
Войти
 Дифференциальная эволюция, оптимизирующая двухмерную функцию Экли.
Дифференциальная эволюция, оптимизирующая двухмерную функцию Экли. В эволюционных вычислениях, дифференциальная эволюция (DE) - это метод, который оптимизирует проблему посредством итеративно, пытаясь улучшить кандидата. решение с учетом заданного показателя качества. Такие методы широко известны как метаэвристика, поскольку они делают мало предположений или не делают никаких предположений об оптимизируемой проблеме и могут искать очень большие пространства возможных решений. Однако метаэвристика, такая как DE, не гарантирует, что когда-либо будет найдено оптимальное решение.
DE используется для многомерных функций с действительным знаком , но не использует градиент оптимизируемой задачи, что означает, что DE не требует решения задачи оптимизации. дифференцируемый, как требуется классическими методами оптимизации, такими как градиентный спуск и квазиньютоновские методы. Следовательно, DE может также использоваться для задач оптимизации, которые даже не непрерывны, являются шумными, меняются со временем и т. Д.
DE оптимизирует проблему, поддерживая совокупность возможных решений и создавая новые возможные решения, комбинируя существующие в соответствии с его простыми формулами, а затем сохраняя любое возможное решение, имеющее лучший результат или соответствие рассматриваемой задаче оптимизации. Таким образом, проблема оптимизации рассматривается как черный ящик, который просто обеспечивает меру качества при наличии возможного решения, и поэтому градиент не нужен.
DE изначально принадлежит Сторну и Прайсу. Были опубликованы книги по теоретическим и практическим аспектам использования DE в параллельных вычислениях, многокритериальной оптимизации, ограниченной оптимизации, а также книги содержат обзоры областей применения. Обзоры по многогранным исследовательским аспектам DE можно найти в журнальных статьях.
Базовый вариант алгоритма DE работает, имея совокупность возможных решений (называемых агентами). Эти агенты перемещаются в пространстве поиска с помощью простых математических формул для объединения позиций существующих агентов из совокупности. Если новая позиция агента является улучшением, то она принимается и составляет часть популяции, в противном случае новая позиция просто отбрасывается. Процесс повторяется, и тем самым можно надеяться, но не гарантировать, что в конечном итоге будет найдено удовлетворительное решение.
Формально, пусть 





Пусть 
![\ text {CR} \ in [0,1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec838d2502cf89c36367a85d29a1631424f5e8d2) ,
, ![F \ in [0,2]](https://wikimedia.org/api/rest_v1/media/math/render/svg/f54590c6a6abf343929304b1f22a06333f2e72f1) и
и  .
.  - размер популяции, то есть количество кандидатов в агенты или «родителей»; классическая настройка - 10
- размер популяции, то есть количество кандидатов в агенты или «родителей»; классическая настройка - 10  . Параметр называется вероятностью кроссовера, а параметр называется дифференциальным весом. Классические настройки:
. Параметр называется вероятностью кроссовера, а параметр называется дифференциальным весом. Классические настройки:  и
и  . Эти варианты могут сильно повлиять на производительность оптимизации; см. ниже.
. Эти варианты могут сильно повлиять на производительность оптимизации; см. ниже. со случайными позициями в пространстве поиска.в генеральной совокупности do:
со случайными позициями в пространстве поиска.в генеральной совокупности do:  и
и  из произвольной совокупности, они должны отличаться друг от друга, а также от агента . (
из произвольной совокупности, они должны отличаться друг от друга, а также от агента . ( называется «базовым» вектором.)
называется «базовым» вектором.) где - размерность оптимизируемой задачи.
где - размерность оптимизируемой задачи.![\ mathbf {y} = [y_1, \ ldots, y_n]](https://wikimedia.org/api/rest_v1/media/math/render/svg/26c85478d1c1b15019b6e06cf4c25f6020a2083b) следующим образом:
следующим образом:  выберите равномерно распределенное случайное число
выберите равномерно распределенное случайное число 
 затем замените агент в совокупности улучшенным или равным кандидатом решение
затем замените агент в совокупности улучшенным или равным кандидатом решение  .
.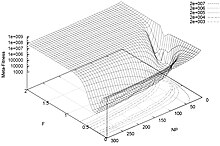 Обзор производительности, показывающий, как базовая DE в совокупности выполняет задачи тестов Sphere и Rosenbrock при изменении двух параметров DE и
Обзор производительности, показывающий, как базовая DE в совокупности выполняет задачи тестов Sphere и Rosenbrock при изменении двух параметров DE и  с фиксированным
с фиксированным  = 0.9.
= 0.9. Выбор параметров DE 
Варианты алгоритма DE постоянно разрабатываются с целью повышения эффективности оптимизации. В базовом алгоритме, приведенном выше, возможно множество различных схем для выполнения скрещивания и мутации агентов, см., Например,