Схема демодулятора на основе петли Фазовой автоподстройки частоты
A Петля Костаса представляет собой контур фазовой автоподстройки частоты Схема на основе (PLL), которая используется для несущей частоты восстановления из сигналов с подавленной несущей модуляции (например, сигналов двойной боковой полосы подавленной несущей) и сигналы фазовой модуляции (например, BPSK, QPSK ). Он был изобретен Джоном П. Костасом в General Electric в 1950-х годах. Его изобретение было описано как оказавшее «глубокое влияние на современные цифровые коммуникации». Основное применение петель Костаса - беспроводные приемники. Его преимущество перед другими детекторами на основе ФАПЧ состоит в том, что при небольших отклонениях напряжение ошибки контура Костаса составляет  по сравнению с
по сравнению с  . Это увеличивает вдвое чувствительность, а также делает петлю Костаса уникально подходящей для отслеживания несущих с доплеровским смещением, особенно в OFDM и GPS-приемниках.
. Это увеличивает вдвое чувствительность, а также делает петлю Костаса уникально подходящей для отслеживания несущих с доплеровским смещением, особенно в OFDM и GPS-приемниках.
Содержание
- 1 Классический реализация
- 2 Математические модели
- 2.1 Во временной области
- 2.2 В фазово-частотной области
- 3 Получение частоты
- 4 Петля QPSK Костаса
- 5 Ссылки
Классическая реализация

Петля Костаса, работающая в заблокированном состоянии.
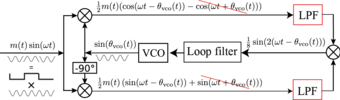
В классической реализации петли Костаса, локальный генератор, управляемый напряжением (ГУН), обеспечивает квадратурные выходы, по одному на каждый из двух фазовые детекторы, например, детекторы продукта. Одна и та же фаза входного сигнала также применяется к обоим фазовым детекторам, а выходной сигнал каждого фазового детектора проходит через фильтр нижних частот. Выходы этих фильтров нижних частот являются входами другого фазового детектора, выход которого проходит через шумоподавляющий фильтр, прежде чем использоваться для управления генератором, управляемым напряжением. Общий отклик контура контролируется двумя отдельными фильтрами нижних частот, которые предшествуют третьему фазовому детектору, в то время как третий фильтр нижних частот играет тривиальную роль с точки зрения усиления и запаса по фазе.
Приведенный выше рисунок петли Костаса нарисован в состоянии "заблокированного" состояния, когда частота ГУН и входящая несущая частота стали одинаковыми в результате процесса петли Костаса. Цифра не соответствует «разблокированному» состоянию.
Математические модели
Во временной области

Модель во временной области цикла BPSK Костаса
В простейшем случае  . Следовательно, не влияет на вход фильтра шумоподавления. Сигналы несущей и генератора, управляемого напряжением (VCO), представляют собой периодические колебания
. Следовательно, не влияет на вход фильтра шумоподавления. Сигналы несущей и генератора, управляемого напряжением (VCO), представляют собой периодические колебания  с высокими частотами
с высокими частотами  . Блок
. Блок  является аналоговым умножителем.
является аналоговым умножителем.
С математической точки зрения линейный фильтр может быть описан системой линейные дифференциальные уравнения

Здесь  - постоянная матрица,
- постоянная матрица,  - вектор состояния filter,
- вектор состояния filter,  и
и  - постоянные векторы.
- постоянные векторы.
Модель ГУН обычно считается линейной
![{\ displaystyle {\ begin {array} {ll} {\ dot {\ theta}} _ {vco} (t) = \ omega _ {vco} ^ {free} + K_ {vco} u_ {LF} (t), t \ в [0, T], \ end {array}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0ffdcbdc3835c357264642bac5721f4f3c54adac)
где  - это частота свободного хода напряжения управляемый генератор, а
- это частота свободного хода напряжения управляемый генератор, а  - коэффициент усиления генератора. Аналогичным образом можно рассматривать различные нелинейные модели ГУН.
- коэффициент усиления генератора. Аналогичным образом можно рассматривать различные нелинейные модели ГУН.
Предположим, что частота задающего генератора постоянна.  Уравнение ГУН и уравнение выхода фильтра
Уравнение ГУН и уравнение выхода фильтра

Система не автономна и достаточно сложна для исследования.
В фазо-частотной области

Эквивалентная фазово-частотная модель петли Костаса

Вход ГУН для фазово-частотной модели петли Костаса
В простейшем случае, когда

стандартный en Техническое предположение состоит в том, что фильтр удаляет верхнюю боковую полосу с частотой из входа, но оставляет нижнюю боковую полосу без изменений. Таким образом, предполагается, что вход ГУН равен  Это делает петлю Костаса эквивалентной схеме фазовой автоподстройки частоты с характеристикой фазового детектора
Это делает петлю Костаса эквивалентной схеме фазовой автоподстройки частоты с характеристикой фазового детектора  в соответствии с конкретными формами волны
в соответствии с конкретными формами волны  и
и  входных сигналов и сигналов VCO. Можно доказать, что выходы фильтров во временной области и фазово-частотной области практически равны.
входных сигналов и сигналов VCO. Можно доказать, что выходы фильтров во временной области и фазово-частотной области практически равны.
Таким образом, можно изучить более простую автономную систему дифференциальных уравнений
 .
.
Метод усреднения Крылова – Боголюбова позволяет доказать близость решений неавтономных и автономных уравнений при некоторых предположениях. Таким образом, блок-схема Costas Loop во временном пространстве может быть асимптотически изменена на блок-схему на уровне фазово-частотных соотношений.
Переход к анализу автономной динамической модели петли Костаса (вместо неавтономной) позволяет преодолеть трудности, связанные с моделированием петли Костаса во временной области, где необходимо одновременно наблюдать очень быстро временная шкала входных сигналов и медленная временная шкала фазы сигнала. Эта идея позволяет рассчитать основные рабочие характеристики - диапазоны удержания, втягивания и захвата.
Получение частоты
 Петля Костаса до синхронизации Петля Костаса до синхронизации |  Петля Костаса после синхронизации Петля Костаса после синхронизации |
 Несущая и сигналы ГУН перед синхронизацией Несущая и сигналы ГУН перед синхронизацией | 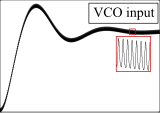 Вход ГУН во время синхронизации Вход ГУН во время синхронизации |  Сигналы несущей и ГУН после синхронизации Сигналы несущей и ГУН после синхронизации |
Классическая петля Костаса будет работать для того, чтобы разность фаз между несущей и ГУН стала небольшой, в идеале нулевой величиной. Небольшая разность фаз означает, что синхронизация частоты была достигнута.
Петля Костаса QPSK
Классическая петля Костаса может быть адаптирована к модуляции QPSK для более высоких скоростей передачи данных.

Классическая петля Костаса QPSK
Вход Сигнал QPSK выглядит следующим образом:

Входы фильтров нижних частот LPF1 и LPF2 являются

После используются выходы синхронизации LPF1  и LPF2
и LPF2  для получения демодулированных данных (
для получения демодулированных данных ( и
и  ). Чтобы отрегулировать частоту ГУН частотных сигналов опорных и проходит через ограничители и перемножается:
). Чтобы отрегулировать частоту ГУН частотных сигналов опорных и проходит через ограничители и перемножается:

После этого сигнала  фильтруется контурным фильтром и формирует сигнал настройки для VCO
фильтруется контурным фильтром и формирует сигнал настройки для VCO  аналогично петле Костаса BPSK. Таким образом, QPSK Костаса можно описать системой ОДУ
аналогично петле Костаса BPSK. Таким образом, QPSK Костаса можно описать системой ОДУ

Здесь  - параметры LPF1 и LPF2 и
- параметры LPF1 и LPF2 и  - параметры петлевого фильтра.
- параметры петлевого фильтра.
Ссылки

 Петля Костаса, работающая в заблокированном состоянии.
Петля Костаса, работающая в заблокированном состоянии.  Модель во временной области цикла BPSK Костаса
Модель во временной области цикла BPSK Костаса  Эквивалентная фазово-частотная модель петли Костаса
Эквивалентная фазово-частотная модель петли Костаса  Вход ГУН для фазово-частотной модели петли Костаса
Вход ГУН для фазово-частотной модели петли Костаса  Петля Костаса до синхронизации
Петля Костаса до синхронизации Петля Костаса после синхронизации
Петля Костаса после синхронизации Несущая и сигналы ГУН перед синхронизацией
Несущая и сигналы ГУН перед синхронизацией Вход ГУН во время синхронизации
Вход ГУН во время синхронизации Сигналы несущей и ГУН после синхронизации
Сигналы несущей и ГУН после синхронизации Классическая петля Костаса QPSK
Классическая петля Костаса QPSK