Робототехническая парадигма
редактировать
В робототехнике роботизированная парадигма представляет собой мысленную модель того, как работает робот. Роботизированная парадигма может быть описана взаимосвязью между тремя основными элементами робототехники : зондирование, планирование и действие. Это также можно описать тем, как сенсорные данные обрабатываются и распределяются по системе и где принимаются решения.
Содержание
- 1 Иерархическая / совещательная парадигма
- 2 Реактивная парадигма
- 3 Гибридная преднамеренная / реактивная парадигма
- 4 См. Также
- 5 Ссылки
Иерархическая / совещательная парадигма
- робот работает по принципу «сверху вниз», тяжело планируя.
- Робот чувствует мир, планирует следующее действие, действует; на каждом шаге робот явно планирует следующий ход.
- Все данные датчиков имеют тенденцию собираться в одну глобальную модель мира.
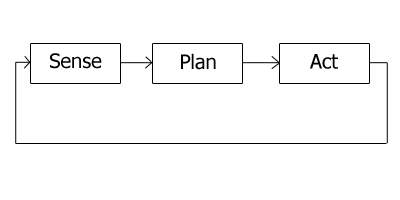
Схема иерархической парадигмы
Реактивная парадигма
- Тип чувственного действия организации.
- Робот имеет несколько экземпляров связей Sense-Act.
- Эти связи представляют собой параллельные процессы, называемые поведениями, которые принимают данные локального зондирования и вычисляют наилучшее действие, которое следует предпринять независимо от что делают другие процессы.
- Робот будет выполнять комбинацию действий.

Схема реактивной парадигмы
Гибридная преднамеренная / реактивная парадигма
- Робот сначала планирует (обдумывает), как лучше всего разложить задачу на подзадачи (также называемые «планирование миссии»), а затем каковы подходящие модели поведения для выполнения каждой подзадачи.
- Затем поведение начинает выполняться в соответствии с реактивной парадигмой.
- Чувствительная организация - это также смесь стилей Иерархический и Реактивный; данные датчика направляются к каждому поведению, которому нужен этот датчик, но также доступны планировщику для построения ориентированной на задачи глобальной модели мира.

Схема гибридной преднамеренной / реактивной парадигмы
См. также
Ссылки
- Asada, H. Slotine, J.-J. Э. (1986). Анализ и управление роботами. Вайли. ISBN 0-471-83029-1.
- Аркин, Рональд С. (1998). Робототехника на основе поведения. MIT Press. ISBN 0-262-01165-4.

 Схема иерархической парадигмы
Схема иерархической парадигмы  Схема реактивной парадигмы
Схема реактивной парадигмы  Схема гибридной преднамеренной / реактивной парадигмы
Схема гибридной преднамеренной / реактивной парадигмы