Модель распределенных вычислений
A Протокол популяции является модель распределенных вычислений, сформированная мобильными агентами с ограниченными ресурсами, которые встречаются случайным образом в соответствии с. Функции вычисляются путем обновления состояния агентов всякий раз, когда они встречаются, на основе их предыдущего состояния, и результат вычисления может быть прочитан в состояниях агентов после того, как вычисления сойдутся.
Содержание
- 1 Модель
- 2 Протокол трех состояний
- 3 История
- 4 См. Также
- 5 Ссылки
Модель
Имеется набор  узлов. Каждый узел представляет собой конечный автомат с состояниями
узлов. Каждый узел представляет собой конечный автомат с состояниями  . Важным классом протоколов популяции являются алгоритмы большинства, целью которых является вычисление бита большинства: каждый узел начинается с бита доверия в
. Важным классом протоколов популяции являются алгоритмы большинства, целью которых является вычисление бита большинства: каждый узел начинается с бита доверия в  , и цель состоит в том, чтобы разработать протокол, в конце которого бит доверия каждого узла является правильным начальным битом большинства.
, и цель состоит в том, чтобы разработать протокол, в конце которого бит доверия каждого узла является правильным начальным битом большинства.
Версия модели с дискретным временем выглядит следующим образом: в каждой точке  во времени, некоторый узел
во времени, некоторый узел  выбирается равномерно случайным образом. Затем узел сопоставляется с другим узлом
выбирается равномерно случайным образом. Затем узел сопоставляется с другим узлом  , который выбирается равномерно случайным образом из набора соседей узла . После этого узлы и обмениваются содержимым памяти и обновляют свои состояния. В качестве альтернативы можно рассмотреть модель непрерывного времени, в которой каждый узел имеет часы Пуассона, которые звонят с единичной скоростью. Когда часы узла звонят, этот узел связывается со случайным соседом.
, который выбирается равномерно случайным образом из набора соседей узла . После этого узлы и обмениваются содержимым памяти и обновляют свои состояния. В качестве альтернативы можно рассмотреть модель непрерывного времени, в которой каждый узел имеет часы Пуассона, которые звонят с единичной скоростью. Когда часы узла звонят, этот узел связывается со случайным соседом.
Протоколы часто разрабатываются так, чтобы минимизировать время сходимости или объем памяти, требуемый на узел, или и то, и другое.
Протокол трех состояний
Для проблемы вычисления большинства (консенсус) существует хорошо известный протокол, который требует только три состояния памяти на узел и был проанализирован на предмет полных графов взаимодействия. Этот протокол работает следующим образом. Пусть каждый узел инициализирует свое состояние памяти своим начальным битом доверия  В каждый момент времени, когда два узла обмениваются данными, они обновляют свое состояние в соответствии со следующей таблицей. Метки строк показывают состояние инициатора, а столбец - состояние респондента.
В каждый момент времени, когда два узла обмениваются данными, они обновляют свое состояние в соответствии со следующей таблицей. Метки строк показывают состояние инициатора, а столбец - состояние респондента.
Правила взаимодействия протокола с 3 состояниями | 0 | ? | 1 |
|---|
| 0 | (0,0) | (0,0) | (0,?) |
|---|
| ? | (?, 0) | (?,?) | (?, 1) |
|---|
| 1 | (1,?) | (1,1) | (1,1) |
|---|
Например, если узел с убеждением  соответствует узлу с убеждением , тогда оба узла сохраняют свою веру; обновление аналогично, если оба убеждения равны
соответствует узлу с убеждением , тогда оба узла сохраняют свою веру; обновление аналогично, если оба убеждения равны  или оба равны
или оба равны  . Однако, если мнение инициатора равно , а мнение респондента , тогда респондент изменяет свое мнение на . Если, с другой стороны, у инициатора есть убеждение , а у респондента есть убеждение , то отвечающий изменяет свое вера в . Обратите внимание, что этот протокол односторонний: каждое взаимодействие изменяет самое большее состояние респондента; таким образом, это может быть реализовано с односторонней связью.
. Однако, если мнение инициатора равно , а мнение респондента , тогда респондент изменяет свое мнение на . Если, с другой стороны, у инициатора есть убеждение , а у респондента есть убеждение , то отвечающий изменяет свое вера в . Обратите внимание, что этот протокол односторонний: каждое взаимодействие изменяет самое большее состояние респондента; таким образом, это может быть реализовано с односторонней связью.
Angluin, Aspnes и Eisenstat показали, что из любой начальной конфигурации, которая не состоит из всех "", приблизительное большинство из трех состояний протокол сходится либо ко всем узлам, имеющим убеждение , либо ко всем узлам, имеющим убеждение в пределах  взаимодействий с высокой вероятностью. Кроме того, выбранное значение будет не- "" начальным значением большинства, при условии, что оно превышает меньшинство с достаточным запасом.
взаимодействий с высокой вероятностью. Кроме того, выбранное значение будет не- "" начальным значением большинства, при условии, что оно превышает меньшинство с достаточным запасом.
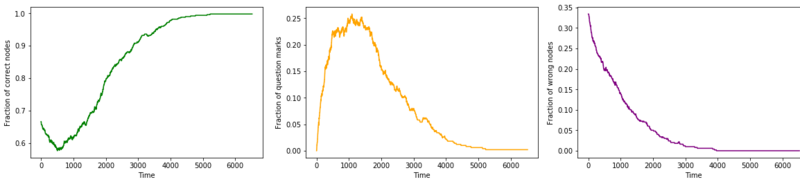
На следующем рисунке показано развитие протокола с тремя состояниями в наборе из  узлов, где одна треть узлов имеет начальные бит доверия , в то время как оставшиеся две трети имеют начальный бит доверия . Доля узлов «» (отмечена оранжевым) начинается с нуля, некоторое время увеличивается, а затем снова возвращается к нулю.
узлов, где одна треть узлов имеет начальные бит доверия , в то время как оставшиеся две трети имеют начальный бит доверия . Доля узлов «» (отмечена оранжевым) начинается с нуля, некоторое время увеличивается, а затем снова возвращается к нулю.
. 
История
Протоколы популяции были представлены Dana Angluin et al. как одна из первых моделей вычислений, которая должна быть полностью децентрализована и задействовать агентов с сильно ограниченными ресурсами, например, тех, которые встречаются в сенсорных сетях. С тех пор эта абстрактная модель вычислений нашла применение в робототехнике и химии.
См. Также
Swarm Intelligence
Ссылки
- ^Alistarh, Dan; Аспнес, Джеймс; Эйзенстат, Дэвид; Гелашвили, Рати; Ривест, Рональд Л. (2017-01-16). "Компромисс между пространством и временем в протоколах заполнения". Сода 17 года. Общество промышленной и прикладной математики: 2560–2579. arXiv : 1602.08032. Bibcode : 2016arXiv160208032A. Cite journal требует
| journal =() - ^ Angluin, Dana; Aspnes, James; Eisenstat, David (2007), «Простой протокол популяции для быстрого и надежного приблизительного большинства», Распределенные вычисления, Лекционные заметки по компьютерным наукам, 4731, Springer Berlin Heidelberg, стр. 20–32, doi : 10.1007 / 978-3-540-75142-7_5, ISBN 9783540751410
- ^Perron, E.; Vasudevan, D.; Vojnovic, M. (апрель 2009 г. «Использование трех состояний для двоичного консенсуса на полных графах». IEEE INFOCOM 2009 - 28-я конференция по компьютерным коммуникациям. IEEE: 2527–2535. doi : 10.1109 / infcom.2009.5062181. ISBN 9781424435128.
- ^Дана Англуин, Джеймс Аспнес, Зои Диамади, Майкл Дж. Фишер, Рене Перальта. Вычисления в сетях пассивно мобильных конечных состояний. датчики. Распределенные вычисления, 2006. [1]

- ^Грегори Дудек, Майкл Дженкин. Вычислительные принципы мобильной робототехники, Глава 10.
- ^Хо-Лин Чен, Дэвид Доти, Дэвид Соловейчик. Вычисление детерминированных функций с помощью сетей химических реакций. Natural Computing, 2014. [2pting

