
Войти
 Локальная касательная плоскость восток-север (ENU) аналогична NED, за исключением замены «вниз» на «вверх» и x для y.
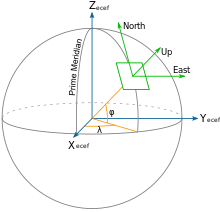
Локальная касательная плоскость восток-север (ENU) аналогична NED, за исключением замены «вниз» на «вверх» и x для y. Локальные координаты касательной плоскости (LTP ), иногда называемые локальными вертикальными, локальными горизонтальными координатами (LVLH ), являются географическая система координат, основанная на локальном вертикальном направлении и земной оси вращения. Он состоит из трех координат : одна представляет положение по северной оси, одна по местной восточной оси и одна представляет собой вертикальное положение. Существуют два варианта правосторонних : координаты восток, север, верх (ENU) и координаты север, восток, низ (NED). Они служат для представления векторов состояния, которые обычно используются в авиации и морской кибернетике.
Эти фреймы зависят от местоположения. Для перемещений вокруг земного шара, таких как воздушная или морская навигация, рамки определяются как касательные к линиям географических координат :
Во многих приложениях для наведения и отслеживания местная декартова система координат восток, север, верх (ENU) гораздо более интуитивно понятна и практична, чем ECEF или геодезическая координаты. Локальные координаты ENU формируются из плоскости, касательной к поверхности Земли, привязанной к определенному месту, и поэтому ее иногда называют «местной касательной» или «местной геодезической» плоскостью. По соглашению восточная ось обозначается 


В самолете большинство интересующих объектов находятся под ним, поэтому разумно определить вниз как положительное число. Координаты Север, Восток, Вниз (NED) позволяют использовать это в качестве альтернативы ENU. По соглашению, северная ось обозначается 


Начало этой системы координат обычно выбирается как точка на поверхности геоида ниже центра тяжести самолета. Однако следует соблюдать осторожность, поскольку если самолет ускоряется (поворачивает или ускоряется линейно), то координаты NED больше не являются инерциальными координатами.
Координаты NED аналогичны ECEF в том, что они декартовы, однако они могут быть более удобными из-за относительно небольшого количества задействованных чисел, а также из-за интуитивно понятных осей. Координаты NED и ECEF могут быть связаны следующей формулой:

где 






.