
Войти
Векторное управление, также называемое полевым управлением (FOC), является метод управления частотно-регулируемым приводом (VFD), в котором токи статора трехфазного электродвигателя переменного тока идентифицируются как два ортогональные компоненты, которые можно визуализировать с помощью вектора. Один компонент определяет магнитный поток двигателя, другой - крутящий момент. Система управления привода вычисляет соответствующие задания компонентов тока на основе заданий магнитного потока и крутящего момента, заданных системой управления скоростью привода. Обычно пропорционально-интегральные (ПИ) контроллеры используются для поддержания измеренных компонентов тока на их эталонных значениях. Широтно-импульсная модуляция частотно-регулируемого привода определяет переключение транзистора в соответствии с заданными напряжениями статора, которые являются выходными сигналами ПИ-регуляторов тока.
FOC используется для управления AC синхронными и асинхронными двигателями. Первоначально он был разработан для высокопроизводительных двигателей, которые должны работать плавно во всем диапазоне скорости, генерировать полный крутящий момент при нулевой скорости и иметь высокие динамические характеристики, включая быстрые <36.>ускорение и замедление. Тем не менее, он становится все более привлекательным для приложений с более низкой производительностью, а также из-за размера двигателя FOC, стоимости и превосходства в снижении энергопотребления. Ожидается, что с увеличением вычислительной мощности микропроцессоров он в конечном итоге почти повсеместно вытеснит управление с одной переменной скалярной вольт -на- герц (В / f)..
 Блок-схема из заявки на патент США Блашке 1971 года
Блок-схема из заявки на патент США Блашке 1971 года К. Хассе из Технического университета Дармштадта и Ф. Блашке из Сименса впервые применили векторное управление двигателями переменного тока, начиная с 1968 года и в начале 1970-х годов. Хассе с точки зрения предложения косвенной борьбы с переносчиками, Блашке с точки зрения предложения прямой борьбы с переносчиками. Вернер Леонхард из Технического университета Брауншвейга продолжил разработку методов FOC и сыграл важную роль в открытии возможностей для приводов переменного тока, чтобы стать конкурентоспособной альтернативой приводам постоянного тока.
. Однако только после коммерциализации микропроцессоры, то есть в начале 1980-х годов стали доступны приводы переменного тока общего назначения. Препятствия на пути использования ВОП для приводов переменного тока включали более высокую стоимость и сложность, а также более низкую ремонтопригодность посравнению с приводами постоянного тока, при этом для ВОП до этого момента требовалось много электронных компонентов в виде датчиков, усилителей и т. Д.
Park Трансформация уже давно широко используется при анализе и исследовании синхронных и асинхронных машин. Преобразование, безусловно, является единственной наиболее важной концепцией, необходимой для понимания того, как работает FOC, концепция была впервые концептуализирована в статье 1929 года, автором которой является Роберт Х. Парк. Статья Пака заняла второе место по значимости среди всех работ по энергетике, когда-либо опубликованных в двадцатом веке. Новизна работы Парка заключается в его способности преобразовывать линейное дифференциальное уравнение любой связанной машины из одного набора с изменяющимися во времени коэффициентами в другое с неизменными во времени коэффициентами.
Обзор основных конкурирующих платформ управления VFD:
| VFD, с датчиком или без датчика |
| |||||||||||||||||||||||||||
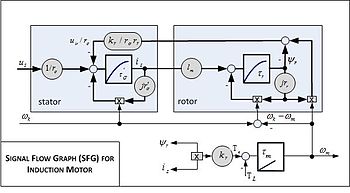 График потока сигнала (SFG) для индукции Двигатель
График потока сигнала (SFG) для индукции Двигатель  Уравнения SFG
Уравнения SFG 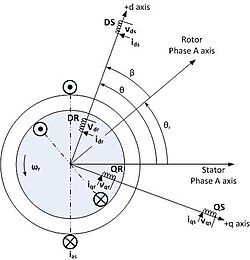 (d, q) Система координат, наложенная на трехфазный асинхронный двигатель
(d, q) Система координат, наложенная на трехфазный асинхронный двигатель 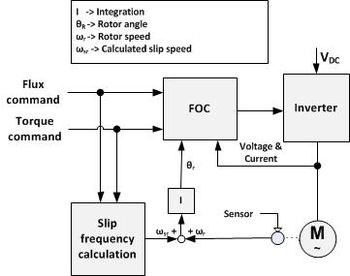 Упрощенная блок-схема косвенного FOC
Упрощенная блок-схема косвенного FOC  Упрощенная блок-схема прямого FOC
Упрощенная блок-схема прямого FOC  Блок-схема FOC без датчика
Блок-схема FOC без датчика Пока анализ управления приводом переменного тока может быть технически довольно сложным (см. также раздел), такой анализ неизменно начинается с моделирования приводного двигателя ci Схема задействована в соответствии с линиями сопровождающего графика потока сигналов и уравнений.
При векторном управлении асинхронный или синхронный двигатель переменного тока управляется во всех рабочих условиях,таких как отдельно возбужденный Двигатель постоянного тока. То есть, двигатель переменного тока ведет себя как двигатель постоянного тока, в котором потокосцепление поля и потокосцепление якоря, создаваемое соответствующими токами поля и якоря (или составляющей крутящего момента), составляют ортогонально выровнен таким образом, что при управлении крутящим моментом магнитная связь поля не изменяется, что обеспечивает динамический отклик крутящего момента.
Векторное управление соответственно генерирует выходное напряжение трехфазного ШИМ двигателя, полученное из комплексного вектора напряжения, для управления комплексным вектором тока, полученным из трехфазного тока статора двигателя. ввод через проекции или вращения вперед и назад между трехфазной системой, зависящей от скорости и времени, и вращающейся системой отсчета этих векторов, двух- координатной системой, не зависящей от времени.
Такой комплексный вектор пространства статора может быть определен в системе координат (d, q) с ортогональными компонентами вдоль осей d (прямая) и q (квадратурная), так что потокосцепление поля составляющая тока выровнена по оси d, а составляющая крутящего момента тока выровнена по оси q. Система координат асинхронного двигателя (d, q) может быть наложена на мгновенную (a, b, c) трехфазную синусоидальную систему двигателя, как показано на сопроводительном изображении (фазы b и c не показаны для ясности). Компоненты вектора системного тока (d, q) допускают обычное управление, такое как пропорциональное и интегральное, или PI, управление, как с двигателем постоянного тока.
Проекции, связанные с системой координат (d, q), обычно включают:
 ,
, ) проекция с использованием преобразования Кларка. Реализации векторного управления обычно предполагают наличие незаземленного двигателя со сбалансированными трехфазными токами, так что необходимо измерять только две фазы тока двигателя. Кроме того, в проекции «два-три назад» (,) -to- (a, b, c) используется пространственно-векторный ШИМ-модулятор или обратное преобразование Кларка и один из других ШИМ-модуляторов.,) -to- (d, q) и (d, q) -to- (,) с использованием преобразований Парка и обратных преобразований Парка соответственно.
) проекция с использованием преобразования Кларка. Реализации векторного управления обычно предполагают наличие незаземленного двигателя со сбалансированными трехфазными токами, так что необходимо измерять только две фазы тока двигателя. Кроме того, в проекции «два-три назад» (,) -to- (a, b, c) используется пространственно-векторный ШИМ-модулятор или обратное преобразование Кларка и один из других ШИМ-модуляторов.,) -to- (d, q) и (d, q) -to- (,) с использованием преобразований Парка и обратных преобразований Парка соответственно.Однако нередко источники используют тройку к двум, (a, b, c) -to- (d, q) и обратные проекции.
Хотя вращение системы координат (d, q) может быть произвольно установлено на любую скорость, существует три предпочтительных скорости или системы отсчета:
Развязка крутящий момент и токи возбуждения, таким образом, могут быть получены из исходных токов статора для разработки алгоритма управления.
Принимая во внимание, что компоненты магнитного поля и крутящего момента в двигателях постоянного тока могут управляться относительно просто путем раздельного управления соответствующими токами поля и якоря, Для экономичного управления двигателями переменного тока в приложениях с регулируемой скоростью потребовалась разработка микропроцессорных устройств управления, при этом все приводыпеременного тока теперь используйте мощную технологию DSP (цифровая обработка сигналов ).
Инверторы могут быть реализованы как незамкнутый бесконтактный или закрытый ed-loop FOC, обеспечивающий ограничение работы без обратной связи, является минимальной скоростью, возможной при 100% крутящем моменте, а именно около 0,8 Гц по сравнению с остановкой для работы с обратной связью.
Используется два метода управления, прямое или обратная связь Новое управление (DFOC) и другое используется Векторное управление с прямым связью (IFOC), IFOC чаще, потому что что в режиме замкнутого контура такие приводы легче во всем диапазоне от нулевой скорости до высокоскоростной ослаблением поля. В DFOC сигналы обратной связи по величине магнитного потока вычисляются напрямую с использованием так называемых моделей напряжения или тока. Vicki: Beat, который был полуавтобиографическим по своей природе и включал в себя ее хитовые песни, а также ее самые известные джинглы. Спектакль стал продолжением ее популярного шоу
Pokémon 2.B.A. Освойте {kind=link}