
Войти
 Кручение вдоль геодезической.
Кручение вдоль геодезической. В дифференциальной геометрии понятие кручения - это способ характеристики закручивания или винта движущейся рамки по кривой. Кручение кривой, как оно появляется в формулах Френе – Серре, например, количественно определяет поворот кривой вокруг ее касательного вектора по мере ее развития (или, скорее, поворот шкалы Френе – Серре относительно касательного вектора). В геометрии поверхностей геодезическое кручение описывает, как поверхность скручивается вокруг кривой на поверхности. Сопутствующее понятие кривизны измеряет, как движущиеся кадры «катятся» по кривой «без скручивания».
В более общем смысле, на дифференцируемом коллекторе, оборудованном аффинным соединением (то есть соединением в касательном связке ), кручение и кривизна образуют два основных инварианта связи. В этом контексте кручение дает внутреннюю характеристику того, как касательные пространства скручиваются вокруг кривой, когда они перемещаются параллельно ; тогда как кривизна описывает, как касательные пространства катятся по кривой. Кручение может быть описано конкретно как тензор или как вектор-значение 2-формы на коллекторе. Если ∇ является аффинной связностью на дифференциальном многообразии, то тензор кручения определяется в терминах векторных полей X и Y как
![T (X, Y) = \ nabla _ {X} Y- \ nabla _ {Y} X- [X, Y]](https://wikimedia.org/api/rest_v1/media/math/render/svg/48c20ccb17431a4ccc168f73908ab0e3f22a98d4)
где [X, Y] - Скобка Ли векторных полей.
Кручение особенно полезно при изучении геометрии геодезических. Для данной системы параметризованных геодезических можно указать класс аффинных связей, имеющих эти геодезические, но различающихся их кручением. Существует уникальная связь, которая поглощает кручение, обобщая связь Леви-Чивиты на другие, возможно, неметрические ситуации (например, финслерова геометрия ). Разница между связью с кручением и соответствующей связью без кручения - это тензор, называемый тензором замыкания. Поглощение кручения также играет фундаментальную роль в исследовании G-структур и метода эквивалентности Картана. Кручение также полезно при изучении непараметризованных семейств геодезических через связанную проективную связь. В теории относительности такие идеи были реализованы в форме теории Эйнштейна – Картана.
Пусть M - многообразие с аффинной связностью на касательном расслоении (также известное как ковариантная производная ) ∇. Тензор кручения (иногда называемый тензором Картана (кручения)) - это вектор-двумерная форма, определенная на векторных полях X и Y как
![T (X, Y): = \ nabla _ {X} Y- \ nabla _ {Y} X- [X, Y]](https://wikimedia.org/api/rest_v1/media/math/render/svg/55760fe285c2f2c64f86ec729c788172c93bb0b0)
где [X, Y] - скобка Ли двух векторных полей. По правилу Лейбница T (fX, Y) = T (X, fY) = fT (X, Y) для любой гладкой функции f. Таким образом, T является тензорным, несмотря на то, что он определен в терминах связи, который является дифференциальным оператором первого порядка: он дает 2-форму на касательных векторах, тогда как ковариантная производная определяется только для векторных полей.
Компоненты тензора кручения 

Здесь 

![T ^ {k} { } _ {{ij}} = 2 \ Gamma ^ {k} {} _ {{[ij]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ab8247e0713e7e599e045a0a5c174d8dc6bd4e81)
Форма кручения, альтернативная характеристика кручения, применяется к связке кадров FM многообразия M. Это основной пучок снабжен формой связи ω, однозначной формой gl (n), которая отображает вертикальные векторы на генераторы правильного действия в gl (n) и эквивариантно переплетает правое действие GL (n) на касательном пучке FM с присоединенным представлением на gl (n). Связка фреймов также несет каноническую одну форму θ со значениями в R, определенную в фрейме u ∈ F x M (рассматриваемом как линейная функция u: R → T x M) по

где π: FM → M - отображение проекции для главного расслоения, а π ∗ - его продвижение вперед. Тогда форма кручения

Эквивалентно Θ = Dθ, где D - внешняя ковариантная производная, определяемая связью.
Форма кручения представляет собой (горизонтальную) тензорную форму со значениями в R, что означает, что при правильном действии g ∈ Gl (n) она преобразуется эквивалентно :

где g действует справа - стороны через его сопряженное представление на R.
Форма кручения может быть выражена в терминах формы соединения на базовом многообразии M, записанные в конкретном фрейме касательного пучка (e1,..., en). Форма связи выражает внешнюю ковариантную производную этих основных участков:

Форма припоя для касательное расслоение (относительно этой системы отсчета) является дуальным базисом θ ∈ TM системы ei, так что θ (ej) = δ j (Дельта Кронекера ). Тогда торсионная 2-форма имеет компоненты

В крайнем правом выражении
![{\ displaystyle {T ^ {k}} _ {ij } = \ theta ^ {k} \ lef t (\ nabla _ {\ mathbf {e} _ {i}} \ mathbf {e} _ {j} - \ nabla _ {\ mathbf {e} _ {j}} \ mathbf {e} _ {i} - \ left [\ mathbf {e} _ {i}, \ mathbf {e} _ {j} \ right] \ right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/003a8e60b5f698367219e5da83250e4a51b53c16)
компоненты каркаса тензора кручения, как указано в предыдущем определении.
Легко показать, что Θ трансформируется тензорно в том смысле, что если другой кадр

для некоторой обратимой матричнозначной функции (g i), тогда

В остальные члены, Θ - тензор типа (1, 2) (несущий один контравариантный и два ковариантных индекса).
В качестве альтернативы, форма припоя может быть охарактеризована независимо от кадра как TM-значная однозначная форма θ на M, соответствующая тождественному эндоморфизму касательного расслоения при изоморфизме двойственности End (TM) ≈ TM ⊗ TM. Тогда 2-форма кручения представляет собой сечение

, заданное как

где D - внешняя ковариантная производная. (Подробнее см. форму соединения.)
Тензор кручения можно разложить на две неприводимые части: a часть без следов и другая часть, содержащая термины трассировки. Используя обозначение индекса , след T задается как

а бесследная часть равна

где δ j - дельта Кронекера.
По сути,

след T, tr T, является элементом TM, определяемым следующим образом. Для каждого вектора, фиксированного X ∈ TM, T определяет элемент T (X) из Hom (TM, TM) через

Тогда (tr T) (X) определяется как след этого эндоморфизма. То есть

Без следов тогда часть T равна

где ι обозначает внутреннее произведение.
тензор кривизны - это отображение TM × TM → End (TM), заданный на векторных полях X, Y и Z формулой
![{\ Displaystyle R (X, Y) Z = \ nabla _ {X} \ nabla _ {Y} Z- \ nabla _ {Y} \ nabla _ {X} Z- \ nabla _ {[X, Y ]} Z.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b4c06786c30c0e5937bbce502e4f812c73026b8)
Для векторов в точке это определение не зависит от того, как векторы расширяются на векторные поля вдали от точки (таким образом, он определяет тензор, во многом аналогичный кручению).
Тождества Бьянки соотносят кривизну и кручение следующим образом. Пусть 

Тогда выполняются следующие тождества


форма кривизны - это gl (n) -значная 2-форма

где, опять же, D обозначает внешнюю ковариантную производную. Что касается формы кривизны и формы кручения, соответствующие тождества Бьянки следующие:


Кроме того, можно восстановить тензоры кривизны и кручения по формам кривизны и кручения следующим образом. В точке u из F x M имеем

где снова u: R → T x M - функция, задающая кадр в волокне, и выбор подъемной силы векторы через π не имеют значения, поскольку формы кривизны и кручения горизонтальны (они обращаются в нуль на неоднозначных вертикальных векторах).
В этом разделе предполагается, что M является дифференцируемым многообразием и ∇ ковариантной производной на касательный пучок к M, если не указано иное.
В классической дифференциальной геометрии кривых, формулы Френе-Серре описывают, как конкретная движущаяся система (система Френе -Серрет рамы) закручивается по кривой. С физической точки зрения кручение соответствует угловому моменту идеализированной вершины, указывающей вдоль касательной к кривой.
Случай многообразия с (метрической) связностью допускает аналогичную интерпретацию. Предположим, что наблюдатель движется по геодезической для соединения. Такой наблюдатель обычно считается инерционным, поскольку он не испытывает ускорения. Предположим, что дополнительно наблюдатель несет с собой систему жестких прямых измерительных стержней (система координат ). Каждый стержень представляет собой прямой отрезок; а геодезическая. Предположим, что каждый стержень параллельно перемещается по траектории. Тот факт, что эти стержни физически перемещаются по траектории, означает, что они увлекаются Ли или распространяются так, что производная Ли каждого стержня по касательной обращается в нуль. Однако они могут испытывать крутящий момент (или крутящие силы), аналогичный крутящему моменту, который ощущается верхом рамы Френе-Серре. Эта сила измеряется кручением.
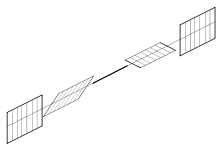
Точнее, предположим, что наблюдатель движется по геодезической траектории γ (t) и несет по ней измерительный стержень. Стержень сметает поверхность, пока наблюдатель движется по траектории. Вдоль этой поверхности находятся естественные координаты (t, x), где t - параметр времени, затраченный наблюдателем, а x - положение вдоль измерительной рейки. Условие того, что касательная к стержню должна быть параллельна смещению вдоль кривой:

Следовательно, кручение задается как

Если это не ноль, то отмеченные точки на стержне (x = постоянные кривые) начертят спирали вместо геодезических. Они будут иметь тенденцию вращаться вокруг наблюдателя. Обратите внимание, что для этого аргумента не было существенным, что 
Эта интерпретация кручения играет роль в теории телепараллелизма, также известной как теория Эйнштейна – Картана, альтернативной формулировке теории относительности.
В материаловедении, и особенно в теории упругости, идеи кручения также играют важную роль. Одна из задач моделирует рост лоз, фокусируясь на вопросе о том, как лозы могут вращаться вокруг предметов. Сама лоза моделируется как пара упругих нитей, скрученных друг вокруг друга. В состоянии минимизации энергии виноградная лоза естественно растет в форме спирали. Но лозу также можно растянуть, чтобы увеличить ее протяженность (или длину). В этом случае скручивание лозы связано с кручением пары нитей (или, что то же самое, с кручением поверхности ленты, соединяющей нити), и отражает разницу между максимизирующей длину (геодезической) конфигурацией лозы. и его энергосберегающая конфигурация.
В гидродинамике кручение естественным образом связано с вихревыми линиями.
Предположим, что γ (t) - кривая на M. Тогда γ - аффинно параметризованная геодезическая при условии, что

для всего времени t в области γ. (Здесь точка обозначает дифференцирование по t, которое связывает с γ касательный вектор, указывающий вдоль нее.) Каждая геодезическая однозначно определяется своим начальным касательным вектором в момент времени t = 0, 
Одно приложение кручения соединения включает геодезический спрей соединения: примерно семейство всех аффинно параметризованных геодезических. Кручение - это неоднозначность классификации соединений с точки зрения их геодезических брызг:
Точнее, если X и Y - пара касательных векторов в точке p ∈ M, тогда пусть

- разность двух связей, вычисленная в терминах произвольных расширений X и Y от точки p. Согласно правилу произведения Лейбница, можно увидеть, что Δ на самом деле не зависит от того, как расширяются X и Y '(поэтому оно определяет тензор на M). Пусть S и A - симметричные и чередующиеся части Δ:


Тогда
 - разность тензоров кручения.
- разность тензоров кручения.Другими словами, симметричная часть разности двух соединений определяет, имеют ли они одинаковые параметризованные геодезические, тогда как косая часть разница определяется относительным скручиванием двух соединений. Еще одно следствие:
. Это обобщение фундаментальной теоремы римановой геометрии на общие аффинные (возможно, неметрические) связи. Выбор уникального соединения без кручения, подчиненного семейству параметризованных геодезических, известен как поглощение кручения, и это один из этапов метода эквивалентности Картана.