
Войти
В Control Engineering a servomechanism, иногда сокращается до servo, является автоматическим устройством, которое использует обнаружение ошибок отрицательной обратной связи для корректировки работы механизма. В приложениях с регулируемым смещением он обычно включает встроенный энкодер или другой механизм обратной связи по положению для обеспечения достижения желаемого результата на выходе.
Этот термин правильно применяется только к системам, в которых обратная связь или сигналы коррекции ошибок помогают контролировать механическое положение, скорость, положение или любые другие измеримые переменные. Например, управление автомобильным стеклоподъемником не является сервомеханизмом, так как нет автоматической обратной связи, которая управляет положением - оператор делает это путем наблюдения. В отличие от этого в автомобиле круиз-контроль используется обратная связь с обратной связью, которая классифицирует его как сервомеханизм.
 Проходной регулирующий клапан с пневматическим приводом и «позиционером». Это сервопривод, который обеспечивает открытие клапана в желаемое положение независимо от трения.
Проходной регулирующий клапан с пневматическим приводом и «позиционером». Это сервопривод, который обеспечивает открытие клапана в желаемое положение независимо от трения. Обычный тип сервопривода обеспечивает управление положением. Обычно сервоприводы электрические, гидравлические или пневматические. Они работают по принципу отрицательной обратной связи, когда управляющий вход сравнивается с фактическим положением механической системы, измеренным с помощью какого-либо типа преобразователя на выходе. Любая разница между фактическим и желаемым значениями («сигнал ошибки») усиливается (и преобразуется) и используется для управления системой в направлении, необходимом для уменьшения или устранения ошибки. Эта процедура является одним из широко используемых приложений теории управления. Типичные сервоприводы могут давать поворотный (угловой) или линейный выходной сигнал.
Управление скоростью с помощью регулятора - это еще один тип сервомеханизма. паровая машина использует механические регуляторы; другим ранним применением было регулирование скорости водяных колес. До Второй мировой войны пропеллер постоянной скорости был разработан для управления частотой вращения двигателя маневрирующих самолетов. В регуляторах подачи топлива для газотурбинных двигателей используется либо гидромеханическое, либо электронное управление.
Сервомеханизмы позиционирования были впервые использованы в военном оборудовании управления огнем и морской навигации. Сегодня сервомеханизмы используются в автоматах, антеннах слежения за спутниками, самолетах дистанционного управления, автоматических навигационных системах на лодках и самолетах, а также в системах управления зенитной артиллерией . Другими примерами являются проводные системы в самолетах, которые используют сервоприводы для приведения в действие рулевых поверхностей самолета, и радиоуправляемые модели, которые используют сервоприводы RC для та же цель. Многие камеры с автофокусировкой также используют сервомеханизм для точного перемещения объектива. Жесткий диск имеет магнитную сервосистему с субмикрометровой точностью позиционирования. В промышленных машинах сервоприводы используются для выполнения сложных движений во многих приложениях.
 Промышленный серводвигатель. Серо-зеленый цилиндр - это щеточный двигатель двигатель постоянного тока. Черная секция внизу содержит планетарный редуктор, а черный объект в верхней части двигателя - это оптический датчик угла поворота для обратной связи по положению.
Промышленный серводвигатель. Серо-зеленый цилиндр - это щеточный двигатель двигатель постоянного тока. Черная секция внизу содержит планетарный редуктор, а черный объект в верхней части двигателя - это оптический датчик угла поворота для обратной связи по положению. 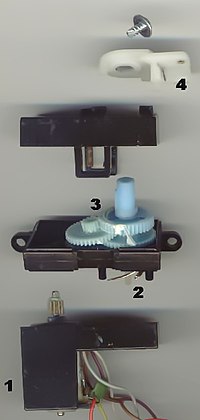 Маленький сервомеханизм с дистанционным управлением.. 1. электродвигатель. 2. обратная связь по положению потенциометр. 3. редуктор шестерня. 4. рычаг привода
Маленький сервомеханизм с дистанционным управлением.. 1. электродвигатель. 2. обратная связь по положению потенциометр. 3. редуктор шестерня. 4. рычаг привода A серводвигатель - это двигатель особого типа, который в сочетании с датчиком вращения или потенциометром образует сервомеханизм. Этот узел, в свою очередь, может быть частью другого сервомеханизма. Потенциометр обеспечивает простой аналоговый сигнал для индикации положения, в то время как энкодер обеспечивает обратную связь по положению и, как правило, по скорости, что с помощью ПИД-регулятора позволяет более точно контролировать положение и, таким образом, быстрее достигать стабильного положения ( для заданной мощности двигателя). Потенциометры подвержены дрейфу при изменении температуры, тогда как энкодеры более стабильны и точны.
Серводвигатели используются как для дорогих, так и для недорогих приложений. На верхнем уровне представлены прецизионные промышленные компоненты, в которых используется датчик угла поворота. На нижнем уровне находятся недорогие сервоприводы с радиоуправлением (RC сервоприводы), используемые в радиоуправляемых моделях, которые используют автономный двигатель и простой датчик положения потенциометра со встроенным контроллером. Термин «серводвигатель» обычно относится к высокопроизводительному промышленному компоненту, тогда как термин «сервопривод» чаще всего используется для описания недорогих устройств, в которых используется потенциометр. Шаговые двигатели не считаются серводвигателями, хотя они также используются для создания более крупных сервомеханизмов. Шаговым двигателям присуще угловое позиционирование из-за их конструкции, и это обычно используется в режиме разомкнутого контура без обратной связи. Обычно они используются для приложений средней точности.
RC сервоприводы используются для приведения в действие различных механических систем, таких как рулевое управление автомобилем, управляющие поверхности на плоскости или руль лодки. Благодаря их доступности, надежности и простоте управления микропроцессорами, они часто используются в небольших робототехнических приложениях. Стандартный RC-приемник (или микроконтроллер) отправляет сигналы широтно-импульсной модуляции (PWM) на сервопривод. Электроника внутри сервопривода переводит ширину импульса в положение. Когда сервопривод получает команду на вращение, двигатель получает питание до тех пор, пока потенциометр не достигнет значения, соответствующего заданному положению.
 Системы рулевого управления с усилителем были первыми пользователями сервомеханизмов, обеспечивающих перемещение руля в желаемое положение.
Системы рулевого управления с усилителем были первыми пользователями сервомеханизмов, обеспечивающих перемещение руля в желаемое положение. паровой двигатель Джеймса Ватта регулятор обычно считается первой системой обратной связи с питанием. веер ветряной мельницы является более ранним примером автоматического управления, но, поскольку он не имеет усилителя или усиления, он обычно не считается сервомеханизмом.
Первым устройством управления положением с обратной связью был судовой рулевой двигатель, используемый для позиционирования руля больших кораблей в зависимости от положения штурвала корабля. Джон Макфарлейн Грей был пионером. Его запатентованный дизайн был использован на SS Great Eastern в 1866 году. Джозеф Фаркот может заслужить не меньшее признание за концепцию обратной связи, имея несколько патентов между 1862 и 1868 годами.
Телемотор был изобретен около 1872 года Эндрю Беттсом Брауном, что позволило значительно упростить сложные механизмы между диспетчерской и двигателем. Двигатели с паровым рулевым управлением имели характеристики современного сервомеханизма: вход, выход, сигнал ошибки и средство для усиления сигнала ошибки, используемого для отрицательной обратной связи, чтобы довести ошибку до нуля. Механизм Ragonnet реверсивный представлял собой сервоусилитель общего назначения с воздушным или паровым приводом для линейного движения, запатентованный в 1909 году.
Электрические сервомеханизмы использовались еще в 1888 году в Элиша Грей Телавтограф.
Для электрических сервомеханизмов требуется усилитель мощности. Вторая мировая война привела к развитию электрических сервомеханизмов управления огнем с использованием амплидина в качестве усилителя мощности. Ламповые усилители использовались в ленточном накопителе UNISERVO для компьютера UNIVAC I. Королевский флот начал эксперименты с дистанционным управлением мощностью (RPC ) на HMS Champion в 1928 году и начал использовать RPC для управления прожекторами в начале 1930-х годов. Во время Второй мировой войны RPC использовался для управления артиллерийскими установками и наводчиками орудий.
В современных сервомеханизмах используются твердотельные усилители мощности, обычно построенные на основе MOSFET или тиристорных устройств. Маленькие сервоприводы могут использовать силовые транзисторы.
Считается, что это слово происходит от французского «Le Servomoteur» или «ведомый двигатель», впервые использованный JJL Farcot в 1868 году для описания гидравлических и паровых двигателей, используемых в управлении кораблем..
В простейших типах сервоприводов используется управление ударами. Более сложные системы управления используют пропорциональное управление, ПИД-регулирование и управление пространством состояний, которые изучаются в современной теории управления.
Сервоприводы можно классифицировать с помощью их систем управления с обратной связью:
полоса пропускания сервопривода указывает способность сервопривода отслеживать быстрые изменения в заданном вводе.
| coauthors =()| На Wikimedia Commons есть медиа относится к Сервоприводы. |