
Войти
 Модель посадочного модуля Schiaparelli в ESOC (2016) Модель посадочного модуля Schiaparelli в ESOC (2016) | |||||||||||||
| Тип миссии | Марсианский посадочный модуль / демонстратор технологий | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Оператор | ESA ·Роскосмос | ||||||||||||
| COSPAR ID | 2016-017A | ||||||||||||
| SATCAT no. | 41388 | ||||||||||||
| Веб-сайт | Веб-сайт миссии ЕКА | ||||||||||||
| Продолжительность миссии | Запланировано: от 2 до 8 солей (пребывание на поверхности). До 3-дневного побережья между разделением и записью | ||||||||||||
| Свойства космического корабля | |||||||||||||
| Производитель | Thales Alenia Space | ||||||||||||
| Стартовая масса | 577 кг (1272 фунта) | ||||||||||||
| Размеры | Диаметр: 2,4 м (7,9 футов). Высота: 1,8 м (5,9 футов) | ||||||||||||
| Начало миссии | |||||||||||||
| Дата запуска | 14 марта 2016 года, 09:31 (2016-03-14UTC09: 31) UTC | ||||||||||||
| Ракета | Протон-М / Бриз-М | ||||||||||||
| Стартовая площадка | Байконур Площадка 200/39 | ||||||||||||
| Подрядчик | Хруничев | ||||||||||||
| Конец миссии | |||||||||||||
| Ликвидация | Произошла аварийная посадка | ||||||||||||
| Уничтожен | 19 октября 201 г. 6 (2016-10-20) | ||||||||||||
| Место посадки | Meridiani Planum, Марс. 2 ° 03'S 6 ° 13'W / 2,05 ° S 6,21 ° W / - 2,05; -6.21 (место крушения посадочного модуля Schiaparelli EDM) | ||||||||||||
| |||||||||||||
| ExoMars программа Rover Rosalind Franklin. и Kazachok → | |||||||||||||
Schiaparelli EDM (итальянский: ) был отказавшийся модуль демонстрации входа, спуска и посадки (EDM) программы ExoMars - совместная задача Европейского космического агентства (ESA) и Российского космического агентства Роскосмос. Он был построен в Италии и предназначен для отработки технологий будущих мягких посадок на поверхности Марса. У него также было ограниченное, но целевое научное оборудование, которое могло бы измерять атмосферное атмосферное на Марсе и местные метеорологические условия.
Запущен вместе с ExoMars Trace Gas Orbiter (TGO) 14 марта 2016 г. Скиапарелли предпринял попытку приземления 19 октября 2016 года. Телеметрические сигналы Скиапарелли, отслеживаемые в режиме реального времени Гигантский радиотелескоп Метревэйв в Индии (и подтвержденные Марс Экспресс ), были потеряны около одной минута от поверхности на последних этапах приземления. 21 октября 2016 года НАСА опубликовало изображение с орбитального аппарата Mars Reconnaissance Orbiter, на котором видно место крушения спускаемого аппарата. Данные телеметрии, собранные и переданные ЕКА ExoMars Trace Gas Orbiter и Mars Express, были использованы для исследования режима использованной технологии посадки.
 могила Скиапарелли в Милане, Италия
могила Скиапарелли в Милане, Италия Модуль демонстратора входа, спуска и посадки Скиапарелли назван в честь Джованни Скиапарелли (1835–1910), астронома XIX века, который наблюдал за Марсом. В частности, он записал произведения, которые он назвал canali на своем родном итальянском языке. Его наблюдения за тем, что на английском языке переводится как каналы, вдохновили многих. Темные полосы на Марсе - это характеристика альбедо, которая связывает с распределением пыли; эти особенности альбедо на Марсе медленно меняются с течением времени, и последние несколько десятилетий их наблюдали орбитальные аппараты Марса. Скиапарелли разработано созданных от руки карт Марса во время его противостояния с Землей в 1877 году с помощью оптического телескопа. Он также был первым астрономом, определившим взаимосвязь между обломками комет и ежегодными метеорными ливнями.
Другие объекты, названные в честь Скиапарелли, включая астероид главного пояса 4062 Скиапарелли, названный 15 сентября 1989 г. (MPC 15090), лунный кратер Скиапарелли, марсианский кратер Скиапарелли, Скиапарелли Дорсум на Меркурии и 2016 ExoMars Посадочный модуль EDM.
Миссия получила название в ноябре 2013 года; ранее он известен как Exomars Entry, модуль-демонстратор спуска и посадки, или сокращенно ExoMars EDM. Другое название - статический посадочный модуль ExoMars, однако некоторые конструкции того, что было статическим посадочным модулем, сильно отличаются от различных этапов проектирования и реструктуризации программы. Другое название, особенно для орбитального аппарата и посадочного модуля вместе, - ExoMars 2016.
 Это космическое искусство под названием The Next Stop было выбрано ЕКА при обсуждении его флагманской программы ExoMars «Аврора» и его х. люди, переносящие пыльную бурю на Марсе возле пилотируемого марсохода.
Это космическое искусство под названием The Next Stop было выбрано ЕКА при обсуждении его флагманской программы ExoMars «Аврора» и его х. люди, переносящие пыльную бурю на Марсе возле пилотируемого марсохода.  Модели Скиапарелли и марсохода ExoMars в ESA ESTEC, 2014
Модели Скиапарелли и марсохода ExoMars в ESA ESTEC, 2014 EDM ведет себя обратно по программе ESA Aurora, которая имеет цель исследованияа человека и, следовательно, создание миссий, которые являются строительными блоками для поддержки этой цели. ExoMars возник из этого и предоставляет контекст для понимания EDM. Скиапарелли является важным «блоком» в обучении посадке тяжелых грузов на Марс, что жизненно важно для будущих пилотируемых миссий. Еще один «блок» - марсоход ExoMars, который, помимо прочего, использует способность преодолевать несколько километров / миль по поверхности Марса. Программа «Аврора» ориентирована на два типа миссий: один - это более крупный флагманский космический корабль, а другой - более мелкие миссии, специально предназначенные для снятия риска с более чем миссий. Есть также различные научные цели:
Научные цели ExoMars: поиск следов прошлой и настоящей жизни; характеристика водной / геохимической среды как функции глубины на мелководье; изучение окружающей среды на поверхности и выявление опасностей для будущих полетов человека; и, наконец, исследование недр и глубин планеты, чтобы лучше понять эволюцию и пригодность Марса для жизни.
— ExoMars Rover - Обзор результатов фазы B1, 2008 г.Важной датой в его разработке стал 2005 год, когда совет ЕКА утвердил 650 миллионов евро на марсоход и статический посадочный модуль. В то время идея заключалась в том, чтобы один запуск доставить на Марс марсоход класса Mars Exploration Rover и инструментальный статический модуль с более простой крейсерской ступенью; в этом случае статический посадочный модуль и приземлил марсоход, и выполнил свою собственную исследование. Однако для выполнения поставленных задач в рамках ограничений ракеты-носителя "Союз" марсоход запланирован на 6 кг в один момент. Это привело к поиску более крупных ракет; Были оценены Ариана V, Атлас V и Протон. Рассматриваются более тяжелые пусковые установки, рассматриваемые и более тяжелые марсоходы от 180 до 600 кг, и в итоге идея испытательного посадочного модуля для снятия риска с посадочного модуля марсохода была принята серьезно и хорошо сочеталась с двухпусковой установкой, которая позволяет использовать более тяжелый орбитальный аппарат и более тяжелый вездеход. Еще одним фактором было то, должен ли демонстратор ждать на орбите Марса начала Глобальной пыльной бури. В начале идеи заключалась в том, чтобы посадочный модуль перевозился на специальной разработке круизной ступени под названием Carrier Module. В конце концов, миссия Trace Gas Orbiter была объединена с ExoMars, ставим базовым кораблем для EDM.
Планировалось, что более старая итерация статического посадочного модуля будет нести группу из одиннадцати инструментов, вместе называемых «полезной нагрузкой Гумбольдта». это будет посвящено исследованию геофизики глубоких недр. Проверка подтверждения полезной нагрузки в первом квартале 2009 года привела к серьезному уменьшению объема инструментов посадочного модуля, и набор Гумбольдта был отменен. Условные инструменты в полезной нагрузке Гумбольдта включают подповерхностный радар, метеорологические инструменты и геофизические инструменты.
Хотя посадочный модуль потерпел крушение, данные, переданные от Schiaparelli, как ожидается, предоставят ESA и Роскосмос с технологией посадки на поверхность Марса с управляемой мягкой посадкой. Эта программа запускает марсоходе Розалинд Франклин, входящем в программу ExoMars, запланирован на 2022 год.
Спускаемый модуль Schiaparelli массой 577 кг (1272 фунта) и орбитальный аппарат завершили испытания и интегрированы в ракету Протон-М на космодроме Байконур в Байконуре в г. Байконуре. середина января 2016 года. ТГО и ЭДМ прибыли на Байконур в декабре 2015 года. В феврале космический корабль был установлен на разгонный блок Бриз-М, а в начале марта - на ракете «Протон».
Запуск произошел в 09:31 по Гринвичу (15:31 по местному времени) 14 марта 2016 года. За следующие 10 часов до запуска аппарата и орбитального аппарата произошли четыре ожога ракеты. В тот день в 21:29 по Гринвичу был получен сигнал с орбитального аппарата, подтверждающий, что запуск прошел успешно и космический корабль функционировал нормально. Вскоре после отделения от зондов верхняя ступень ускорителя Бриз-М взорвалась в нескольких километрах, не повредив орбитальный аппарат или посадочный модуль.

После запуска орбитального аппарата Trace Gas Orbiter (TGO) и EDM вместе отправились в космос по инерции к Марсу. В это время EDM питался от шлангокабеля до TGO, таким образом сохраняя ограниченные внутренние батареи EDM. 28 июля и 11 августа главным двигателем TGO был выполнен маневр в глубоком космосе в двух этапах с целью наведения на угол траектории входа и место посадки. 14 октября 2016 года TGO окончательно скорректировал свою траекторию перед отделением Скиапарелли. Стартовая масса двух космических кораблей вместе составляет 4332 кг, включая 600-килограммовый модуль Скиапарелли. Это был самый тяжелый космический корабль, когда-либо отправленный на Марс. Путешествие с Земли на Марс в 2016 году заняло около 7 месяцев.
16 октября 2016 года TGO и EDM разделились, орбитальный аппарат направился к выводу на орбиту Марса, а EDM - к входу в атмосферу Марса. Перед разделением EDM раскручивали на 2,5 об / мин (см. Также стабилизация вращения ), а затем отпускали со скоростью около 1 км / ч относительно TGO. EDM был разработан для перехода в режим гибернации с пониженным энергопотреблением примерно на 3 дня, пока он самостоятельно летел на Марс. EDM вышел из спячки примерно за полтора часа до того, как достигнута марсианской атмосферы. Между тем, после разделения TGO скорректировал свою траекторию для выхода на орбиту Марса и к 19 октября 2016 года выполнил 139-минутный запуск ракетного двигателя, чтобы выйти на орбиту Марса. В тот же день модуль Скиапарелли прибыл на Марс, двигаясь со скоростью 21 000 км / ч (13 000 миль в час; 5,8 км / с), и приступил к выполнению своей главной задачи - входа, спуска и посадки. После успешного входа в атмосферу скорость модуля была снижена с начального значения 5,8 км / с до нескольких сотен м / с помощью силе сопротивления, создаваемой атмосферной Марса. тепловой экран был использован для защиты полезной нагрузки на этом этапе от сильной тепловой нагрузки. Парашют сработал бортовым программным продуктом, когда акселерометры зафиксировали заданное негравитационное ускорение 9 м / с, как и ожидалось. Достигнув дозвукового режима с помощью номинально надутого парашюта, в модуле Скиапарелли произошла аномалия, в результате чего задняя часть корпуса и парашют высвободились раньше, чем ожидалось, и не позволили ретророзеткам замедлить спуск. Место жесткого приземления, реконструированное с использованием данных Марсианский разведывательный орбитальный аппарат, было определено довольно близко от предполагаемого места приземления, примерно в 6,4 км от него. TGO вышел на орбиту Марса и в течение нескольких месяцев подвергался аэродинамическому торможению для корректировки своей скорости и орбиты, а научные исследования начались в конце 2017 года. TGO продолжит служить в качестве спутника-ретранслятора для будущей посадки на Марс миссии до 2022 года.
 Вид на Меридиани Планум с марсохода «Оппортьюнити» в 2004 году, район, популярный для посадки зондов из-за его гладких дюн и в основном свободных от валунов равнин.
Вид на Меридиани Планум с марсохода «Оппортьюнити» в 2004 году, район, популярный для посадки зондов из-за его гладких дюн и в основном свободных от валунов равнин.  вид на Меридиани Планум с марсохода Opportunity. Обод кратера Бополу находится вдали, а также в зоне приземления Скиапарелли
вид на Меридиани Планум с марсохода Opportunity. Обод кратера Бополу находится вдали, а также в зоне приземления Скиапарелли Выбранная площадка для посадки была Меридиани Планум, марсианская равнина, ценимая марсианами за ее ровный рельеф и низкую высоту, что дает космическому кораблю и пространству для замедления не дойдя земли. EDM не может предотвратить препятствий во время спуска, поэтому было важно выбрать большую ровную площадку с минимумом препятствий. Эллипс приземления составляет около 100 км в длину и 15 км в ширину, с центром на 6 ° западной долготы и 2 ° южной широты, идущей с востока на запад, с восточным краем, включая посадочную площадку марсохода Opportunity, и возле кратера Endeavour, где он все еще работал, когда был запущен EDM, и когда он пытался приземлиться. Место посадки марсохода Opportunity (MER-B) называется Мемориальной станцией Challenger. Также считалось, что EDM будет иметь шанс получить знания об атмосфере в этих менее распространенных условиях. Сайт также известен как интересный с научной точки зрения; Марсоход Opportunity обнаружил тип минерала железа, который образует в прошлом там состояние воды, поэтому в прошлом там было значительное количество воды.
 Красная звезда обозначает запланированную посадочную площадку для посадочного модуля ExoMars Schiaparelli EDM. : Meridiani Planum, недалеко от того места, где марсоход приземлился в 2004 году.
Красная звезда обозначает запланированную посадочную площадку для посадочного модуля ExoMars Schiaparelli EDM. : Meridiani Planum, недалеко от того места, где марсоход приземлился в 2004 году. Посадка планировалась на Meridiani Planum во время сезона пыльных бурь, что дало бы возможность охарактеризовать запыленную атмосферу во время входа и спуска, измерить заряд пыли статическим электричеством, обычно производным трением, и проводить поверхностную обработку, связанную с богатой пылью окружающей средой.
 Покадровая съемка марсианского горизонта за 30 марсианских дней показывает, сколько солнечного света заблокировали пылевые бури в июле 2007 года; Тау 4,7 означает, что 99% солнечного света заблокировано.
Покадровая съемка марсианского горизонта за 30 марсианских дней показывает, сколько солнечного света заблокировали пылевые бури в июле 2007 года; Тау 4,7 означает, что 99% солнечного света заблокировано. Глобальные пыльные бури случались по крайней мере девять раз с 1924 года, включая 1977, 1982, 1994, 2001 и 2007; пыльные бури 2007 г. почти прекратили работу американской марсоходов Mars Exploration Rovers Spirit и Opportunity на солнечной энергии. Глобальные пыльные бури закрывали Марс, когда орбитальный аппарат Mariner 9 прибыл туда в 1971 году, и потребовалось несколько недель, чтобы пыль осела и позволила получить четкое изображение поверхности Марса. Было предсказано, что глобальные пыльные бури на Марсе могут произойти осенью 2016 года, но они не начались, когда EDM попытался приземлиться. Летом 2018 года на Марс обрушились пыльные бури, заглушившие свет для солнечного марсохода Opportunity, который все еще работал рядом с местом посадки Скиапарелли.
 Вот машина входа в систему MSL во время парашютной фазы спуска. Скиапарелли был спроектирован таким образом, чтобы парашют находился на высоте 11 км над Марсом.
Вот машина входа в систему MSL во время парашютной фазы спуска. Скиапарелли был спроектирован таким образом, чтобы парашют находился на высоте 11 км над Марсом.  Вот входной аппарат MSL, сбрасывающий свой тепловой экран над Марсом. Schiaparelli был спроектирован таким образом, чтобы сбрасывать свой нижний тепловой экран на высоте 7 км над Марсом.
Вот входной аппарат MSL, сбрасывающий свой тепловой экран над Марсом. Schiaparelli был спроектирован таким образом, чтобы сбрасывать свой нижний тепловой экран на высоте 7 км над Марсом.  Изображение EDM во время части его посадки на Марс с помощью ракеты
Изображение EDM во время части его посадки на Марс с помощью ракеты Посадочный модуль Schiaparelli отделился от орбитального корабля TGO 16 октября 2016 г., за три дня до прибытия на Марс, и вошел в атмосферу на скорости 21 000 км / ч (13 000 миль / ч) 19 октября 2016 г. (см. Также Вход в атмосферу Марса ). Когда посадочный модуль отключился от орбитального аппарата, он переключился. от внутренней батареи и использовал режим гибернации с низким энергопотреблением, пока он работал в течение трех дней перед входом в атмосферу Марса. Скиапарелли вышел из спячки за несколько часов до своего входа на скорость 21 000 км / ч (13 000 миль в час) и на высоте 122,5 км (76,1 мили) над поверхностью Марса. Тепловой экран использовался во время погружения в атмосферу для замедления спускаемого аппарата до 1650 км / ч (1030 миль / ч) к моменту времени, когда он достиг высоты 11 км (6,8 мили). Во время входа в систему COMARS + EDM собирает данные о том, как тепло и воздух обтекают входную капсулу.
После замедления своего первоначального входа в атмосферу модуль развернул парашют и должен был завершить посадку на ретророзеты с использованием замкнутой системы наведения, навигации и управления на основе доплеровского датчика радиолокационного высотомера и бортовых инерциальных измерительных блоков. Во время спуска различные датчики регистрировали ряд атмосферных параметров и характеристики спускаемого аппарата. План заключался в том, что на высоте 7 км (4,3 мили) будет сброшен передний тепловой экран и включен радиолокационный высотомер, а затем на высоте 1,3 км (0,81 мили) над Марсом будут сброшены задний тепловой экран и парашют.
Заключительные этапы посадки должны были быть выполнены с использованием импульсных двигателей на жидком топливе или ретроковых двигателей. На высоте около двух метров над землей двигатели были спроектированы так, чтобы отключаться и позволять платформе приземляться на разрушаемую конструкцию, предназначенную для деформации и поглощения удара при окончательном приземлении. При окончательной посадке он был спроектирован так, чтобы выдерживать камни высотой около одного фута, и надеялись, но не гарантировали, что на нем не встретятся большие валуны или кратеры. При окончательном контакте посадочный модуль был спроектирован так, чтобы выдерживать уклоны до 19 градусов и скалы высотой до 38 см (15 дюймов).
марсоход Opportunity работал в этом регионе и две команды работали вместе, чтобы попытаться получить изображение EDM при его спуске, что, в зависимости от условий, могло быть возможным, особенно если EDM "проделал длинный" посадочный эллипс. Однако камеры марсохода не видели посадочный модуль во время его спуска. Это была первая попытка наземного зонда сфотографировать приземление другого транспортного средства с поверхности Марса. (Другие космические аппараты сфотографировали друг друга, особенно орбитальные аппараты, наблюдающие на земле, а в 2005 году Mars Global Surveyor сфотографировал Mars Express на орбите вокруг Марса.)
Сводка EDL (как и планировалось):
| Высота | Скорость | Событие | ||
|---|---|---|---|---|
| 121 км | 75 миль | 21000 км / ч | 13000 миль / ч | Введите атмосферу |
| 45 км | 28 миль | 19000 км / ч | 12000 миль / ч | Пиковый нагрев |
| 11 км | 6,8 мили | 1700 км / ч | 1100 миль / ч | Парашют развернут |
| 7 км | 4,3 мили | 320 км / ч | 200 миль / ч | Отбрасывание нижнего теплового экрана и активация доплеровского радара |
| 1,2 км | 0,75 мили | 240 км / ч | 150 миль / ч | Верхний тепловой экран и парашют выброшены |
| 1,1 км | 0,68 мили | 250 км / ч | 160 миль / ч | Ретро-ракеты на |
| 2 м | 6,6 футов | 4 км / ч | 2,5 миль / ч | Стар ракеты взлетают |
| 0 м | 0 футов | 10 км / ч | 6,2 м ph | Коснитесь смятого бампера под космическим кораблем |
Контакт с модулем был потерян за 50 секунд до запланированного приземления. К 21 октября 2016 года, после изучения данных, ЕКА заявило, что, скорее всего, что-то пошло не так, когда парашют был выпущен раньше времени, двигатели включались, но выключались через слишком короткое время.
Посадочный модуль Schiaparelli предпринял попытку автоматической посадки 19 октября 2016 г., но сигнал был неожиданно потерян незадолго до запланированного времени посадки. ЕКА Марс Экспресс и НАСА Марсианский орбитальный аппарат (MRO) и MAVEN продолжали безрезультатно прослушивать сигнал посадочного модуля.
Скиапарелли передавал информацию о 600 мегабайт телеметрии во время попытки приземления, и подробный анализ показал, что его вход в атмосферу происходил нормально, парашют раскрылся на скорости 12 км (7,5 миль) и 1730 км / ч (1070) миль в час), а его тепловой экран сработал на 7,8 км (4,8 миль). Однако инерциальный измерительный блок посадочного модуля, который измеряет вращение, стал насыщенным (неспособным принимать более высокие показания) примерно на одну секунду. Это насыщение в сочетании с данными навигационного компьютера дало отрицательное значение высоты или ниже уровня земли. Это привело к преждевременному освобождению парашюта и задней части корпуса. Затем тормозные двигатели сработали примерно на три секунды вместо ожидаемых 30 секунд, после чего сработали наземные системы, как если бы автомобиль уже приземлился. На самом деле он все еще находился на высоте 3,7 км (2,3 мили). Посадочный модуль продолжал отключения в течение 19 секунд после двигателей; потеря сигнала произошла за 50 секунд до предполагаемой посадки. Скиапарелли столкнулся с поверхностью Марса со скоростью 540 км / ч (340 миль в час), близкой к предельной скорости.
 Контекстная камера MRO изображения места посадки Скиапарелли; до (29 мая 2016 г.) и после (20 октября 2016 г.). Большое черное пятно указывает на удар посадочного модуля, а белое пятно на его парашют.
Контекстная камера MRO изображения места посадки Скиапарелли; до (29 мая 2016 г.) и после (20 октября 2016 г.). Большое черное пятно указывает на удар посадочного модуля, а белое пятно на его парашют. Через день после попытки приземления Контекстная камера службы ТОиР НАСА определила новые наземные отметки из-за удара посадочного модуля и парашют. Место крушения находится примерно в 54 км (~ 33,5 мили) от того места, где находился активный марсоход НАСА Opportunity во время приземления. 27 октября 2016 года ЕКА опубликовала изображения с высоким разрешением места крушения, используемую камеру MRO HiRISE 25 октября 2016 года. Идентифицированы передний теплозащитный экран, место удара модуля, задний теплозащитный экран и парашют. Считается, что глубина кратера составляет около полуметра (ярда), и возможно дальнейшее изучение этого кратера возможно в более позднее время. Кстати, искусственно созданный кратер был на самом деле целью миссии THOR, предложенной в рамках программы Mars Scout, которая произвела Phoenix и MAVEN, было подземные цели целью раскопки. Эта миссия была обнаружен леден, но другой орбитальный аппарат смог естественные свежие ударные кратеры.
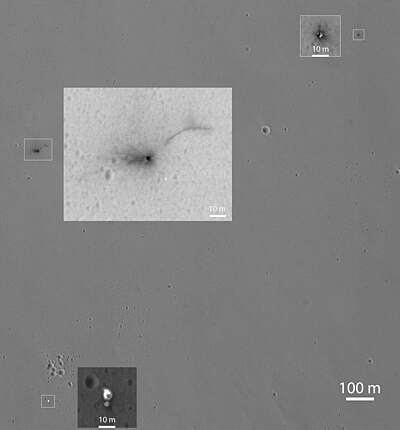 MRO HiRISE снимок падения зоны Скиапарелли, сделанный 25 октября 2016 года. на изображениях показаны области идентифицированные как удар посадочного модуля (в центре слева), удар переднего теплозащитного экрана (вверху справа), а также парашют и задний тепловой экран (внизу слева)
MRO HiRISE снимок падения зоны Скиапарелли, сделанный 25 октября 2016 года. на изображениях показаны области идентифицированные как удар посадочного модуля (в центре слева), удар переднего теплозащитного экрана (вверху справа), а также парашют и задний тепловой экран (внизу слева) | Задача | Оценка |
|---|---|
| Маневр отделения | Да |
| Включение / выключение гибернации | Да |
| Вход в гиперзвуковую атмосферу | Да |
| Парашют развернут | Да |
| Выброшен тепловой экран | Да |
| Выброс парашюта и задней части корпуса | Безевременный |
| Включаются ретро-ракеты | Преждевременные |
| Ретро-ракеты выключаются | Преждевременное |
Хотя посадочный модуль потерпел крушение, официальные лица ЕКА объявили Скиапарелли успешным, поскольку он выполнил свою основную функцию по тестированию системы посадки посадочного модуля Kazachok 2020 года и возвращению обратно. g данные телеметрии во время его спуска. К 20 октября большая часть данных о спуске была возвращена на Землю и анализировалась. В отличие от посадочного модуля Beagle 2, о котором больше не было слышно после того, как его выпустили с Mars Express в 2003 году, модуль Exomars передавался во время спуска, поэтому данные, собранные и переданные на спуск, не были потеряны, если космический корабль был уничтожен. при ударе.
Расследование, завершившееся в мае 2017 года, показало, что в это время спускаемый аппарат развернул парашют, а затем начал неожиданно быстро вращаться. Это произошло к большой ошибке оценки ориентации программным сверх системы наведения, навигации и управления. Это к тому же вычислил, что он был ниже уровня земли, вызвав раннее высвобождение парашюта и обратного кожуха, кратковременное срабатывание двигателей только на 3 секунды 30 секунд активации наземной системы, как если бы Скиапарелли
Изображения места крушения модуля предполагают, что при ударе мог взорваться топливный бак. По оценкам, посадочный модуль врезался в поверхность со скоростью около 300 км / ч (83 м / с; 190 миль в час). Дополнительные изображения этого места к ноябрю еще раз подтвердили идентичность частей космического корабля. Дополнительное изображение было цветным, и было заключено, что парашют был немного смещен.
 Наблюдения HiRISE на месте крушения 1 ноября 2016 года, детализирующие то, что считается основным местом удара космического корабля, нижний тепловой экран и верхний жар щит и парашют. В ходе этого второго наблюдения было зафиксировано, что некоторые из ярких пятен вокруг зоны крушения возникли из-за материала, а не шума или мгновенных отражений.
Наблюдения HiRISE на месте крушения 1 ноября 2016 года, детализирующие то, что считается основным местом удара космического корабля, нижний тепловой экран и верхний жар щит и парашют. В ходе этого второго наблюдения было зафиксировано, что некоторые из ярких пятен вокруг зоны крушения возникли из-за материала, а не шума или мгновенных отражений. Сделано больше изображений с использованием техники, называемой реконструкция со сверхвысоким разрешением (SRR) разрешение может быть улучшено, и это было сделано для ранее потерянного зонда Beagle 2. Два других улучшения качества изображения, такие как попадания космических лучей и реальные объекты, среди ярких пятен объектов с высокими альбедо по сравнению с мгновенными зеркальными отражениями. Наконец, с помощью нескольких изображений с течением времени можно наблюдать движение и изменения, такие как ветер, развевающий парашют.
 Исследовательская станция Конкордия - еще одна миссия, которая поддерживает Человеческая миссия ЕКА на Марс в поддержку программы исследования Авроры. Атмосферное электричество - одна из проблем, вызывающих беспокойство при полетах человека на Марс, и Скиапарелли, возможно, предоставил первое в истории измерения этого свойства на Марсе.
Исследовательская станция Конкордия - еще одна миссия, которая поддерживает Человеческая миссия ЕКА на Марс в поддержку программы исследования Авроры. Атмосферное электричество - одна из проблем, вызывающих беспокойство при полетах человека на Марс, и Скиапарелли, возможно, предоставил первое в истории измерения этого свойства на Марсе.  INRRI был включен в посадочный модуль InSight Марс. Его можно увидеть здесь, на палубе InSight во время подготовки к запуску.
INRRI был включен в посадочный модуль InSight Марс. Его можно увидеть здесь, на палубе InSight во время подготовки к запуску. Основная цель миссии заключалась в испытании систем приземления, включая парашют, доплеровский радарный высотомер, гидразиновые двигатели и т. Д. Вторичной миссии была научная цель. Посадочный модуль был измерять скорость и направление ветра, влажность, давление и температуру поверхности, а также определять прозрачность атмосферы. Полезная нагрузка для науки о поверхности получила название DREAMS и бюджет для сбора метеорологических данных в течение нескольких дней после приземления, а также для измерения первых измерений атмосферного статического электричества на Марсе.
Спуск. камера (DECA) была включена в полезную нагрузку. Его захваченные изображения должны были быть переданы после приземления. AMELIA, COMARS + и DECA собирали данные во время входа, снижения и приземления в течение примерно шести минут. Большая часть этих данных была передана во время спуска. Хотя часть EDL была увеличена так, чтобы длиться несколько минут, а наблюдение за поверхностью не превышало несколько дней, один прибор, INRRI, представлял собой пассивный лазерный светоотражатель, который можно было использовать как можно дольше, даже десятилетия, для лазерного диапазона. -поиск посадочного модуля.
INRRI был установлен на верхней (зенитной) стороне посадочного модуля, чтобы космический корабль наверху мог навести на него цель. Его масса составляла около 25 граммов, и он был предоставлен Итальянским космическим агентством (ASI). В конструкции использовался кубический угловой отражатель для отражения входящего лазерного света. Кубики выполнены из Кварцевое, которые установлены на опорной конструкции из алюминия. INRRI также был установлен на посадочный модуль InSight Mars.
 Эта концепция художника демонстрирует электрически активную пыльную бурю на Марсе, которая, возможно, произвела химические вещества, вызывающие безрезультатные результаты эксперимента по обнаружению жизни спускового аппарата "Викинг". Скиапарелли стремился измерить атмосферное электричество во время сезона марсианской пыльной бури.
Эта концепция художника демонстрирует электрически активную пыльную бурю на Марсе, которая, возможно, произвела химические вещества, вызывающие безрезультатные результаты эксперимента по обнаружению жизни спускового аппарата "Викинг". Скиапарелли стремился измерить атмосферное электричество во время сезона марсианской пыльной бури.  Анимированное изображение пылевого дьявола на Марсе
Анимированное изображение пылевого дьявола на Марсе  Посадочный модуль Phoenix провел эти измерения атмосферной пыли с помощью LIDAR в 2008 году.
Посадочный модуль Phoenix провел эти измерения атмосферной пыли с помощью LIDAR в 2008 году. Научная полезная нагрузка спускового устройства для поверхности представляет собой метеорологический пакет DREAMS (характеристика пыли, оценка рисков и анализатор окружающей среды на поверхности Марса), состоящий из датчиков набора для измерения скорости и направления ветра (MetWind), ох (MetHumi), давления (MetBaro), поверхность температуры (MarsTem), прозрачность атмосферы (датчик солнечного излучения - SIS) и электризация атмосферы (датчик атмосферной релаксации и электрического поля - Micro-ARES). Учреждения, внесшие вклад в научную полезную нагрузку DREAMS, включают INAF и CISAS из Италии, LATMOS из Франции, ESTEC из Нидерландов, FMI из Финляндии и INTA из Испании.
Полезная нагрузка DREAMS была предназначена для работы от 2 до 8 марсианских дней в качестве экологической станции на время наземной миссии после приземления. Запланированное прибытие посадочного модуля было сделано для того, чтобы согласовать с сезоном глобальной пыльной бури на Марсе и собрать данные о запыленной атмосфере Марса. Ожидалось, что DREAMS поможет по-новому взглянуть на роль электрических сил в подъеме пыли - механизме, который вызывает пыльные бури. Кроме того, датчик MetHumi предназначен для дополнения измерений MicroARES, полученных методом электричества пыли.
Атмосферное электричество на Марсе до сих пор не измерено, и его возможная роль в пыльных бурях и химический состав атмосферы остается неизвестным. Было предложено предположение, что атмосферное статическое электричество могло сыграть роль в неубедительных результатах экспериментов с спускаемым аппаратом «Викинг», которые были положительными в отношении метаболизма микробной жизни, но масс-спектрометр не обнаружил соединения. Двумя предпочтительными возможными объяснениями являются реакции с перекисью водорода или озоном, создаваемые ультрафиолетом или атмосферными электрическими процессами во время пыльных бурь.
СНЫ- P был датчиком давления, а DREAMS-H - влажностью; датчики питают единственную печатную плату обработки данных.
В дополнение к наземной полезной нагрузке во время посадочного модуля работала камера под названием DECA (камера спуска). спуск. Он был предназначен для предоставления дополнительной контекстной информации и точных данных о местоположении в виде изображений. DECA - это отражение камеры визуального наблюдения (VMC) миссий Planck и Herschel.
Другим наземным экспериментом, который был сфокусирован на пыли, был Эксперимент по соблюдению материалов на спускаемом аппарате Mars Pathfinder, примерно за двадцать лет до ExoMars.
Камера спуска (DECA) была предназначена для съемки около 15 видов сверху вниз, когда она приближается к поверхности Марса. Получение изображений должно было начаться после того, как был снят нижний тепловой экран. Эта камера имела поле обзора 60 градусов для захвата изображений в оттенках серого для подтверждения технических знаний о спуске. DECA была запасной частью камеры визуального наблюдения космической обсерватории Herschel и миссии Plank, которые были запущены вместе. Размеры камеры - 9 см (3,5 дюйма) в квадрате, при массе 0,6 кг (1,3 фунта). Данные камеры спуска DECA хранились во время спуска и не предназначались для передачи на Землю до момента приземления, поэтому эти изображения были потеряны в результате крушения. Целью этой задержки передачи было защитить космический аппарат и данные от электростатических разрядов. DECA разработан и построен в Бельгии компанией Optique et Instruments de Précision (OIP).
цели DECA включаются:
Временной посадочный модуль демонстратора Schiarapelli во время спуска, большая часть телеметрических данных была успешно возвращена. Около 600 мегабайт, что составляет 80% телеметрии, было передано на Землю и использовались для исследования режима используемой технологии посадки.
Примечание о массах: на У поверхности Марса гравитация меньше, чем на Земле, поэтому вес составляет 37% от веса Земли.
| Диаметр |
|
| Высота | 1, 8 м (5,9 фута) |
| Масса |
|
| Тепловой экран материал | Norcoat Liège |
| Конструкция | Алюминиевый сэндвич с полимером, армированным углеродным волокном обшивкой |
| Парашют | Навес с дисковой полосой, 12 м футов) диаметром |
| Движущая сила |
|
| Мощность | Неперезаряжаемая батарея |
| Связь | УВЧ связь с ExoMars Trace Gas Orbiter или другими соединенными системами связи. |
 На этой диаграмме сравнивается Trace Gas Orbiter с EDM Schiaparelli, прикрепленным к входному конусу с орбитальным аппаратом Mars Express.
На этой диаграмме сравнивается Trace Gas Orbiter с EDM Schiaparelli, прикрепленным к входному конусу с орбитальным аппаратом Mars Express. В какой-то момент Роскосмос внесет 100-ваттный термоэлектрический радиоизотопный генератор (RTG) источник питания для посадочного модуля EDM, чтобы он мог контролировать местную среду в рамках всего марсианского года, но из-за процедур российского экспортного контроля позже он выбрал использование неперезаряжаемой электрической мощности с достаточной мощностью от 2 до 8 золей. Солнечные панели также рассматривались при рассмотрении более продолжительной миссии (1-2 месяца) при поддержке более тяжелого и сложного посадочного модуля. К 2010-м годам основное внимание было уделено проведению краткосрочной (несколько дней на поверхности) демонстрации технологий с упором на системы посадки.
Скиапарелли необычен, поскольку в нем есть только неперезаряжаемые батареи, поэтому его активный срок службы будет ограничен всего марсианскими днями. Это связано с тем, что его основная цель - использовать технологии входа, спуска и посадки.ЕКА, 2016
Скиапарелли имел УВЧ радио для связи с орбитальными аппаратами Марса. Посадочный модуль имел две антенны, одну на задней части корпуса и одну на посадочной платформе. Когда задняя оболочка выбрасывается, модуль передачи сигналов от спиральной антенны на корпусе посадочного. ExoMars TGO также может связываться с ним с помощью системы УВЧ. Когда орбитальный аппарат может связываться с посадочным модулем, зависит от того, где он находится на своем орбите, и не все орбитальные аппараты могут записывать или разговаривать с посадочным модулем, поскольку земной шар Марса блокирует линию обзора для посадочного модуля. ExoMars TGO также может связываться с ним с помощью системы УВЧ. EDM «проснулся» от спячки примерно за 90 минут до приземления и непрерывал непрерывно в течение 15 минут до приземления.
Во время приземления сигнал EDM отслеживался на Марсе с помощью Mars Express и дистанционно с помощью Giant Metrewave Radio Telescope в Пуне, Индия. Mars Express также обменивается данными с другими посадочными модулями и марсоходами, используя свою систему связи Melacom. Марсианский разведывательный орбитальный аппарат (MRO) пролетел над посадочной площадкой через два часа после приземления и был доступен для проверки сигналов от Скиапарелли. ExoMars TGO также может связываться с ним с помощью системы УВЧ.
Стандартная система связи на Марсе является радио Electra, используется с момента прибытия Марсианского разведывательного орбитального аппарата в 2006 году. для этого несколько орбитальных аппаратов использовали систему ретрансляции УВЧ первого поколения, включая Mars Global Surveyor, Mars Odyssey и Mars Express. Использование орбитальных аппаратов для ретрансляции данных с марсоходов и марсоходов отличается своей энергоэффективностью.
19 октября 2016 года радиопередача заняла 9 минут 47 секунд, чтобы добраться от Марса до Земли примерно со скоростью света.. Таким образом, на то, что радиомассив в Пуне слушал в «реальном времени», вся последовательность EDL, которая занимала бы около 6 минут, уже произошла, даже когда она записывалась как начало входа в атмосферу. Есть небольшая вариация, потому что скорость света замедляется воздухом Марса и Земли (см. Показатель преломления ), а другим является замедление времени, потому что зонд На Земле установлена радиостанция с другой скоростью и в другом гравитационном поле (хотя и относительно небольшая).
Посадочный модуль, который имеет два основных компьютера, один из которых называется Центральным Терминал и блок питания (CTPU), размещенный в теплом ящике сверху, а другой компьютер, называемый удаленным терминалом и блоком питания (RTPU), находится на нижней стороне посадочного модуля. В целом, CTPU обрабатывает наземные операции, а RTPU обрабатывает вход и спуск, и фактически он находится на нижней стороне. Когда орбитальный аппарат для подключения газа и модуль входного демонстратора, RTPU обрабатывает интерфейс и передает питание от орбитального аппарата к модулю. Когда он отключается от орбитального аппарата, он должен разрядить свои внутренние батареи. CTPU использует центральный процессор LEON, основанный на Sun Microsystems 'RISC-архитектуру SPARC, а также имеет RAM, PROM и таймер. CTPU также обрабатывает данные, отправленные в радиосвязи UHF. Когда посадочный модуль отключается от орбитального аппарата, он проводит часть своего времени в режиме гибернации с энергопотреблением, пока он проходит через космос перед входом в атмосферу Марса. Посадочный модуль должен перемещаться в течение примерно 3 дней перед посадкой, в течение как орбитальный модуль должен выполнить выведение на орбиту Марса. Данные камеры спуска DECA не загружаются для передачи на Землю до момента приземления, и они не передаются во время спуска.
Дисковый парашют с запрещенной зоной был развернутотехнический миномет. В рамках разработки он прошел полномасштабные испытания в самой аэродинамической трубе в мире. В 2011 году в атмосфере Земли были испытаны маломасштабные парашюты; его подняли на воздушном шаре на высоту 24,5 км, а затем отпустили, а пиротехнические системы запуска были испытаны после периода свободного падения. 19 октября 2016 года парашют был успешно развернут на Марсе.
Летом 2019 года во время испытаний возникли проблемы с парашютом для следующего транша проекта, несмотря на испытание технологии EDM; проблемы с парашютной системой могут задержать этот этап.
Модуль Скиапарелли имеет 3 комплекта из трех двигателей, всего девять, которые работают на расстоянии примерно 1 км (полмили) вверх в импульсном режиме, замедляя космический корабль с 70 до 4 м. / с (от 252 до 14 км / ч). Каждый из девяти двигателей представляет собой ракетный двигатель CHT-400, который может разработать тягу в 400 Ньютонов. Эти ракетные двигатели питаются от трех сферических баков емкостью 17,5 литров, используемые гидразиновый пропеллент. Баки вмещают около 15–16 кг гидразина (около 34 фунтов, 2,4 камня) топлива на каждый бак, или 46 кг в целом (101 фунт или 7,24 камня). Пропеллент находится под давлением гелия, находящегося в единственном баке, содержащем 15,6 литра, при давлении 170 бар (2465 фунтов на квадратный дюйм). Подруливающие устройства выключаются на расстоянии 1-2 метра / ярда от поверхности, после чего зона деформации под остановочным модулем выполняется окончательная модулем. Данные таймера, доплеровского радара и инерциального измерительного блока объединяются в компьютерх посадочного модуля для управления работой двигателей.
Возможное «Момент закрытия» для следующей миссии ExoMars - это министерское совещание ЕКА в декабре 2016 года, на котором были рассмотрены вопросы, включая финансирование ExoMars в размере 300 евро и уроки, извлеченные из миссий ExoMars 2016. Одной из проблем является авария модуля Скиапраелли, поскольку эта система приземления создается почти в дубликате для миссии ExoMars 2020, состоящей из марсохода Розалинд Франклин, доставленного оснащенным спусковым аппаратом 2020 Казачок. Команду ExoMars хвалили за то, что она «показала отношение храброго лица» в том, что произошло, и положительно оценила очень достоверную отдачу EDM от своей основной миссии: данные о входе, спуске и приземлении, несмотря на крушение. Был успешным выводом TGO на орбиту Марса с его большим научным полезной нагрузкой. диозного плана ExoMars, что означало, что технологии приземления прошли испытания в реальных условиях, прежде чем перевезти более ценный груз. Подобно тому, как сам EDM был протестирован на Земле, чтобы узнать, как он будет работать на Марсе, EDM также является тестом для будущих миссий. Изучение того, что произошло, имеет решающее значение, поскольку значительный прорыв в понимании может повлиять на уроки, извлеченные из миссии, что, в свою очередь, повлияет на общественное мнение, технологии, дизайн будущей миссии и даже на чувства всех участников. Например, посадочный модуль Beagle 2 Mars предположительно подвергся высокоскоростному столкновению с Марсом в 2003 году, но когда он был обнаружен на Марсе неповрежденным частично развернутыми панелями, конструкция EDL была утверждена - но только спустя более десяти лет. Ведущий разработчик подвергся резкой критике и даже насмешкам за эту неудачу, в конце умершего кровоизлияния в мозг в 2014 году, всего за год до того, как его космический корабль был найден неповрежденным. Предварительный отчет о неисправности представлен на министерском совещании ЕКА в декабре 2016 года. К декабрю результат известен: ExoMars продолжит получать финансовую поддержку от ESA. На завершение миссии было разрешено 436 миллионов евро (464 миллиона).
После многих сложных, трудных и полезных моментов 2016 года это большое облегчение и прекрасный результат для европейского космического исследования.
— ESA ExoMars руководитель проекта
| На Викискладе есть материалы, связанные с Скиапарелли Посадочный модуль EDM. |