
Войти
 Вырезанная схема бета-двигателя Стирлинга с ромбическим приводом, конструкция 1 (розовый) - горячая стенка цилиндра, 2 (темно-серый) - холодная стенка цилиндра (с впускными и выпускными трубами охлаждающей жидкости, отмеченными 3 желтым цветом), 4 (темно-зеленый) - теплоизоляция разделяющие два конца цилиндра, 5 (светло-зеленый) - поршень буйка, 6 (темно-синий) - приводной поршень, 7 (голубой) - маховики, не показаны: внешний источник тепла и внешние радиаторы. В этой конструкции поршень буйка используется без регенератора.
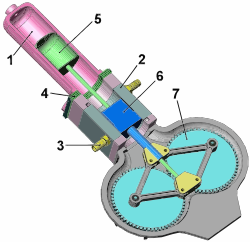
Вырезанная схема бета-двигателя Стирлинга с ромбическим приводом, конструкция 1 (розовый) - горячая стенка цилиндра, 2 (темно-серый) - холодная стенка цилиндра (с впускными и выпускными трубами охлаждающей жидкости, отмеченными 3 желтым цветом), 4 (темно-зеленый) - теплоизоляция разделяющие два конца цилиндра, 5 (светло-зеленый) - поршень буйка, 6 (темно-синий) - приводной поршень, 7 (голубой) - маховики, не показаны: внешний источник тепла и внешние радиаторы. В этой конструкции поршень буйка используется без регенератора. Ромбический привод представляет собой метод конкретных передач механической энергии или работу, используется, когда один цилиндр используются для двух отдельно осциллирующих поршней.
Первоначально он был разработан около 1900 года для двухцилиндрового автомобильного двигателя Lanchester, где он позволял идеально сбалансировать инерционные силы на обоих поршнях. Текущий пример его использования - на двигателях Стирлинга бета-типа ; сложность привода и жесткие допуски, обуславливающие высокую стоимость производства, являются препятствием для широкого использования этого привода.
 Схема двигателя Стирлинга с ромбическим приводом в действии.
Схема двигателя Стирлинга с ромбическим приводом в действии. В своей простейшей форме в приводе используется сочлененный ромбовидный элемент для преобразования линейной работы поршня, совершающего возвратно-поступательное движение, во вращательную работу. Соединительный шток поршня является жестким, в отличие от общего поршневого двигателя, который напрямую соединяет поршень с коленчатым валом с гибким соединением в поршне. Вместо этого стержень соединяется с одним углом ромба. Когда к поршню прилагается сила, он толкает его вниз; при этом внешние углы ромбовидной формы выталкиваются наружу. Они нажимают на два кривошипа / маховика, которые заставляют их вращаться в противоположных направлениях. По мере вращения колес ромб прогрессирует в изменении формы от сглаживания в направлении оси поршня в верхней мертвой точке до сглаживания в перпендикулярном направлении к оси поршня в нижней мертвой точке.
В изображенном примере левый кривошип / маховик вращается по часовой стрелке, а правый кривошип / маховик - против часовой стрелки. Они вращаются с одинаковой угловой скоростью, и это может быть усилено за счет их зацепления как зубчатых колес.