
Войти
 Радиус-вектор
Радиус-вектор  представляет положение точки
представляет положение точки  относительно начала O. В декартовой системе координат
относительно начала O. В декартовой системе координат  .
.В geometry, позиция или вектор позиции, также известный как вектор местоположения или радиус-вектор - это евклидов вектор, который представляет положение точки P в пространстве относительно произвольная ссылка origin O. Обычно обозначается x, rили s, он соответствует отрезку прямой от O до P. Другими словами, это смещение или смещение, отображает начало координат в P:

Термин «вектор положения» используется в основном в полях дифференциала геометрия, механика и иногда векторное исчисление.
Часто это используется в двухмерном или трехмерном пространстве, но может легко обобщается на евклидовы пространства и аффинные пространства любого измерения.
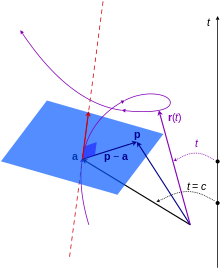 Пространственная кривая в 3D. Позиционный вектор rпараметризован скаляром t. В r= aкрасная линия является касательной к кривой, а синяя плоскость перпендикулярна кривой.
Пространственная кривая в 3D. Позиционный вектор rпараметризован скаляром t. В r= aкрасная линия является касательной к кривой, а синяя плоскость перпендикулярна кривой. В трех измерениях любой набор трехмерных координат и соответствующие им базисные векторы могут использоваться для определения местоположения точки в пространстве - можно использовать то, что проще для решения поставленной задачи.
Обычно используется знакомая декартова система координат, иногда сферические полярные координаты, или цилиндрические координаты :

, где t - параметр из-за их прямоугольной или круговой симметрии. Эти разные координаты и соответствующие базисные векторы представляют один и тот же вектор положения. Вместо этого можно использовать более общие криволинейные координаты, которые используются в контекстах, подобных механике сплошной среды и общей теории относительности (в последнем случае требуется дополнительная временная координата).
Линейная алгебра допускает абстракцию n-мерного вектора положения. Вектор положения может быть выражен как линейная комбинация базисных векторов:

Набор всех векторов позиций образует позиционное пространство (векторное пространство, элементы которого являются векторами позиций), поскольку позиции могут быть добавлены (векторное сложение ) и масштабированы по длине (скалярное умножение ), чтобы получить другой вектор положения в пространстве. Понятие «пространство» интуитивно понятно, поскольку каждый x i (i = 1, 2,…, n) может иметь любое значение, совокупность значений определяет точку в пространстве.
Размер позиционного пространства равен n (также обозначается dim (R) = n). Координаты вектора r относительно базисных векторов eiравны x i. Вектор координат образует вектор координат или n- кортеж (x1, x 2,…, x n).
Каждая координата x i может быть параметризована рядом параметров t. Один параметр x i (t) описывает изогнутую 1D-траекторию, два параметра x i(t1, t 2) описывает изогнутую 2D-поверхность, три x i(t1, t 2, t 3) описывает искривленный трехмерный объем пространства и так далее.
линейный диапазон базисного набора B = {e1, e2,…, en} равен пространству позиций R, обозначенный span (B) = R.
Поля вектора положения используются для описания непрерывных и дифференцируемых пространственных кривых, и в этом случае независимым параметром не обязательно должно быть время, но может быть (например) длина дуги Кривая.
В любом уравнении движения вектор положения r (t) обычно является наиболее востребованной величиной, поскольку эта функция определяет движение частицы (т.е. точечной массы ) - ее положение относительно заданной системы координат в некоторый момент времени t.
Чтобы определить движение в терминах положения, каждая координата может быть параметризована временем; поскольку каждое последующее значение времени соответствует последовательности последовательных пространственных местоположений, заданных координатами, непрерывный предел многих последовательных местоположений - это путь, по которому движется частица.
В случае одного измерения позиция имеет только один компонент, поэтому она эффективно вырождается в скалярную координату. Это может быть, скажем, вектор в направлении x или радиальном направлении r. Эквивалентные обозначения включают

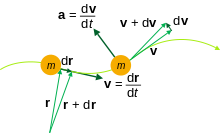 кинематические величины классической частицы: масса m, положение r, скорость v, ускорение a
кинематические величины классической частицы: масса m, положение r, скорость v, ускорение a. Для вектора положения r, который является функцией времени t, производные по времени могут быть вычислены по t. Эти производные широко используются при изучении кинематики, теории управления, инженерии и других наук.
где d r - это бесконечно небольшое смещение (вектор).
Эти имена для первой, второй и третьей производной позиции обычно используются в базовой кинематике. В более широком смысле производные более высокого порядка могут быть вычислены аналогичным образом. Изучение этих производных высшего порядка может улучшить приближение исходной функции смещения. Такие члены высшего порядка необходимы для точного представления функции смещения как суммы бесконечной последовательности, что позволяет использовать несколько аналитических методов в инженерии и физике.


