
Войти
 Изображение облака точек тора
Изображение облака точек тора 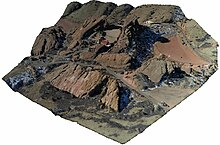 Географически привязанное облако точек Ред-Рокс, Колорадо (от DroneMapper)
Географически привязанное облако точек Ред-Рокс, Колорадо (от DroneMapper) A облако точек набор точек данных в пространстве. Точки представляют собой трехмерную форму или объект. Каждая точка имеет свой набор координат X, Y и Z. Облака точек обычно создаются 3D-сканерами или программным обеспечением фотограмметрии, которые измеряют множество точек на внешних поверхностях объектов вокруг них. В качестве выходных данных процессов 3D-сканирования облака точек используются для многих целей, в том числе для создания 3D CAD моделей для изготовленных деталей, для метрологии и контроля качества, а также для множества визуализаций., анимация, рендеринг и массовая настройка приложений.
Облака точек часто выравниваются с 3D-моделями или с другими облаками точек, этот процесс известен как регистрация набора точек.
Для промышленной метрологии или контроля с использованием промышленной компьютерной томографии, облака точек производимой детали. можно согласовать с существующей моделью и сравнить, чтобы проверить различия. Геометрические размеры и допуски также могут быть извлечены непосредственно из облака точек.
 Пример визуализации облака точек данных с 1,2 миллиардами данных Бейт-Газале, объекта наследия, находящегося под угрозой в Алеппо (Сирия)
Пример визуализации облака точек данных с 1,2 миллиардами данных Бейт-Газале, объекта наследия, находящегося под угрозой в Алеппо (Сирия)  Создание или реконструкция 3D-форм из одного или нескольких просмотр карт глубины или силуэтов и их визуализация в плотных облаках точек
Создание или реконструкция 3D-форм из одного или нескольких просмотр карт глубины или силуэтов и их визуализация в плотных облаках точек Хотя облака точек можно напрямую визуализировать и проверять, облака точек часто преобразуются в полигональную сетку или треугольник модели сетки, модели поверхности NURBS или модели САПР с помощью процесса, обычно называемого реконструкцией поверхности.
Существует множество методов преобразования облака точек в трехмерную поверхность. Некоторые подходы, такие как триангуляция Делоне, альфа-формы и вращение шара, создают сеть треугольников над существующими вершинами облака точек, в то время как другие подходы преобразуют облако точек в объемное поле расстояния и реконструируйте неявную поверхность, определенную таким образом с помощью алгоритма маршевых кубов.
В географическом В информационных системах облака точек являются одним из источников, используемых для создания цифровой модели рельефа местности. Они также используются для создания 3D-моделей городской среды. Дроны часто используются для сбора серии изображений RGB, которые впоследствии могут быть обработаны на платформе алгоритмов компьютерного зрения, такой как AgiSoft Photoscan, Pix4D или DroneDeploy, для создания облаков точек RGB, из которых можно определять расстояния и объемные оценки.
Облака точек также могут использоваться для представления объемных данных, как это иногда делается в медицинской визуализации. Используя облака точек, можно добиться множественной выборки и сжатия данных.
MPEG начал стандартизацию сжатия облака точек (PCC) с призыва к Предложение (CfP) в 2017 году. Были определены три категории облаков точек: категория 1 для статических облаков точек, категория 2 для динамических облаков точек и категория 3 для последовательностей LiDAR (динамически получаемые облака точек). Были окончательно определены две технологии: (PCC на основе геометрии, ISO / IEC 23090, часть 9) для категории 1 и категории 3; и (PCC на основе видео, ISO / IEC 23090, часть 5) для категории 2. Первые тестовые модели были разработаны в октябре 2017 года, одна для (TMC13), а другая для (TMC2). С тех пор две тестовые модели развивались благодаря техническому вкладу и сотрудничеству, и ожидается, что первая версия стандартных спецификаций PCC будет завершена в 2020 году как часть серии ISO / IEC 23090 по кодированному представлению иммерсивного медиа-контента.