
Войти
Чистая сила - это векторная сумма сил, действующих на частицу или тело. Суммарная сила - это единственная сила, которая заменяет влияние исходных сил на движение частицы. Он дает частице такое же ускорение, что и все эти действительные силы вместе, как описано вторым законом движения Ньютона.
В физике можно определить крутящий момент связан с точкой приложения чистой силы, так что он поддерживает движение струй объекта под действием исходной системы сил. Связанный с ним крутящий момент, чистая сила, становится равнодействующей силой и оказывает такое же влияние на вращательное движение объекта, как и все действительные силы вместе взятые. Система сил может определять равнодействующую силу без крутящего момента. В этом случае результирующая сила, приложенная к правильному направлению действия, оказывает на тело такое же воздействие, как и все силы в точках их приложения. Не всегда можно найти равнодействующую силу без крутящего момента.
 Схематический метод сложения сил.
Схематический метод сложения сил. Сила - это векторная величина, что означает что он имеет величину и направление и обычно обозначается жирным шрифтом, например F, или стрелкой над символом, например 
Графически сила представлена в виде отрезка линии от точки ее приложения A до точки B, которая определяет ее направление и величину. Длина отрезка AB представляет величину силы.
Векторное исчисление было разработано в конце 1800-х - начале 1900-х годов. Однако правило параллелограмма, используемое для сложения сил, восходит к древности и явно отмечено Галилеем и Ньютоном.
На диаграмме показано сложение сил 

Силы, приложенные к вытянутому телу, могут иметь разные точки приложения. Силы являются связанными векторами и могут добавляться только в том случае, если они применяются в одной и той же точке. Суммарная сила, полученная от всех сил, действующих на тело, не сохраняет его движения, если не прикладывается в той же точке и не определяется соответствующий крутящий момент, связанный с новой точкой приложения. Чистая сила, приложенная к телу в одной точке с соответствующим крутящим моментом, известна как равнодействующая сила и крутящий момент.

Сила известна как связанный вектор - что означает, что у нее есть направление, величина и точка приложения. Удобный способ определить силу - это отрезок прямой от точки A до точки B. Если мы обозначим координаты этих точек как A = (A x, A y, A z) и B = (B x, B y, B z), то вектор силы, приложенный к точке A, определяется как

Длина вектора B-Aопределяет величину F и задается как

Сумма двух сил F1и F2, приложенных в A, может быть вычислена из суммы сегментов, которые их определяют. Пусть F1=B-Aи F2=D-A, тогда сумма этих двух векторов равна

что может быть записано как

где E - средняя точка отрезка BD, который соединяет точки B и D.
Таким образом, сумма сил F1и F2- это удвоенный отрезок, соединяющий A со средней точкой E отрезка, соединяющего конечные точки B и D двух сил. Удвоение этой длины легко достигается путем определения сегментов BC и DC, параллельных AD и AB, соответственно, чтобы завершить параллелограмм ABCD. Диагональ AC этого параллелограмма представляет собой сумму двух векторов силы. Это известно как правило параллелограмма для сложения сил.
Когда сила действует на частицу, она применяется к одной точке (объем частицы незначителен): это точечная сила, а частица - ее точка приложения. Но внешняя сила, действующая на протяженное тело (объект), может быть приложена к ряду составляющих его частиц, т.е. может «распространяться» по некоторому объему или поверхности тела. Однако определение его вращательного воздействия на тело требует, чтобы мы указали его точку приложения (фактически, линию приложения, как объяснено ниже). Проблема обычно решается следующими способами:
В любом случае анализ движения твердого тела начинается с модели точечной силы. И когда сила, действующая на тело, отображается графически, ориентированный линейный сегмент, представляющий силу, обычно рисуется так, чтобы «начать» (или «закончить») в точке приложения.
 Как сила ускоряет тело.
Как сила ускоряет тело. В примере, показанном на диаграмме напротив, единственная сила 
 - центр ускорения масс; и
- центр ускорения масс; и - угловое ускорение тела.
- угловое ускорение тела.Во втором выражении 

 - вектор крутящего момента, а
- вектор крутящего момента, а - величина крутящего момента.
- величина крутящего момента.Вектор 

Вектор крутящего момента перпендикулярен плоскости, определяемой силой, и вектором
Момент инерции 
 Графическое изображение результирующей силы.
Графическое изображение результирующей силы. Результирующая сила и крутящий момент заменяют эффекты системы сил, действующих на движение твердого тела. Интересным частным случаем является результат без крутящего момента, который можно найти следующим образом:

где 



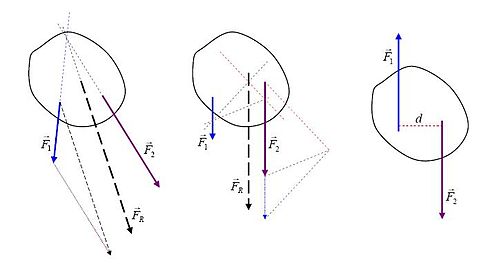
На диаграмме напротив показаны простые графические методы нахождения линии приложения результирующей силы простых плоских систем:
 и
и  на крайней левой иллюстрации пересекаются. После выполнения сложения вектора «в местоположении » полученная результирующая сила переводится так, что его линия приложение проходит через общую точку пересечения. Относительно этой точки все крутящие моменты равны нулю, поэтому крутящий момент результирующей силы равен сумме моментов действительных сил." чистая сила преобразуется в соответствующую строку приложения, где она становится равнодействующей силой
на крайней левой иллюстрации пересекаются. После выполнения сложения вектора «в местоположении » полученная результирующая сила переводится так, что его линия приложение проходит через общую точку пересечения. Относительно этой точки все крутящие моменты равны нулю, поэтому крутящий момент результирующей силы равен сумме моментов действительных сил." чистая сила преобразуется в соответствующую строку приложения, где она становится равнодействующей силой  . Процедура основана на разложении всех сил на составляющие, для которых линии приложения (бледные пунктирные линии) пересекаются в одной точке (так называемый полюс, произвольно установленный в правой части иллюстрации). Затем аргументы из предыдущего случая применяются к силам и их компонентам, чтобы продемонстрировать взаимосвязь крутящего момента.
. Процедура основана на разложении всех сил на составляющие, для которых линии приложения (бледные пунктирные линии) пересекаются в одной точке (так называемый полюс, произвольно установленный в правой части иллюстрации). Затем аргументы из предыдущего случая применяются к силам и их компонентам, чтобы продемонстрировать взаимосвязь крутящего момента. , где
, где  - это расстояние между линиями их применения. Поскольку нет равнодействующей силы, этот крутящий момент может быть описан как «чистый» крутящий момент.
- это расстояние между линиями их применения. Поскольку нет равнодействующей силы, этот крутящий момент может быть описан как «чистый» крутящий момент. Векторная диаграмма для сложения непараллельных сил.
Векторная диаграмма для сложения непараллельных сил. В общем, система действующих сил на твердом теле всегда можно заменить одной силой плюс один чистый (см. предыдущий раздел) крутящий момент. Сила - это чистая сила, но для расчета дополнительного крутящего момента чистая сила должна быть задана направлением действия. Линия действия может быть выбрана произвольно, но дополнительный чистый крутящий момент зависит от этого выбора. В особом случае можно найти такую линию действия, при которой этот дополнительный крутящий момент равен нулю.
равнодействующая сила и крутящий момент могут быть определены для любой конфигурации сил. Однако интересным частным случаем является результат без крутящего момента. Это полезно как с концептуальной, так и с практической точки зрения, потому что тело движется без вращения, как если бы оно было частицей.
Некоторые авторы не отделяют результирующую силу от чистой силы и используют эти термины как синонимы.