
Войти
MIL-STD-1553 - это военный стандарт, опубликованный Министерством обороны США, который определяет механические, электрические и функциональные характеристики последовательной шины данных. Первоначально он был разработан как шина бортовых данных для использования с военной авионикой, но также стал широко использоваться в подсистемах бортовой обработки данных космических кораблей (OBDH), как военных, так и гражданских. Он имеет несколько (обычно двойных) резервированных физических уровней сбалансированных линий, (дифференциальный) сетевой интерфейс, мультиплексирование с временным разделением, полудуплексный протокол команд / ответов и может обрабатывать до 30 удаленных терминалов (устройств). Версия MIL-STD-1553, использующая оптические кабели вместо электрических, известна как MIL-STD-1773.
MIL-STD-1553 был впервые опубликован в качестве стандарта ВВС США в 1973 году и впервые использовался на истребителе F-16 Falcon. Вскоре последовали и другие конструкции самолетов, в том числе F / A-18 Hornet, AH-64 Apache, P-3C Orion, F-15 Eagle и F-20 Tigershark. Сейчас он широко используется всеми видами вооруженных сил США и НАСА. За пределами США он был принят на вооружение НАТО как STANAG 3838 AVS. STANAG 3838 в форме UK MoD Def-Stan 00-18 Part 2 используется на Panavia Tornado ; BAE Systems Hawk (Mk 100 и новее); и широко, вместе со STANAG 3910 - "EFABus", на истребителе Eurofighter Typhoon. Saab JAS 39 Gripen использует MIL-STD-1553B. МиГ-35 российского производства также использует стандарт MIL-STD-1553. Стандарт MIL-STD-1553 заменяется стандартом IEEE 1394 в некоторых новых разработках для США.
MIL-STD-1553B, который заменил более раннюю спецификацию 1975 года MIL-STD-1553A, был опубликован в 1978 году. Основное различие между версиями 1553A и 1553B состоит в том, что в последней версии определены параметры, а не оставляются на усмотрение пользователя. определить по мере необходимости. Было обнаружено, что когда стандарт не определяет предмет, его использование не координируется. Аппаратное и программное обеспечение приходилось переделывать для каждого нового приложения. Основная цель 1553B заключалась в обеспечении гибкости без создания нового дизайна для каждого нового пользователя. Это было достигнуто путем явного указания электрических интерфейсов, чтобы можно было гарантировать электрическую совместимость между конструкциями различных производителей.
С 1978 года было опубликовано шесть уведомлений об изменении стандарта. Например, в уведомлении об изменении 2 в 1986 году название документа было изменено с «Внутренняя шина данных мультиплексирования команд / ответов с временным разделением воздушного судна» на «Цифровая шина данных мультиплексирования команд / ответов с временным разделением. ".
MIL-STD-1553C - это последняя редакция, внесенная в феврале 2018 года.
Стандарт MIL-STD-1553 в настоящее время поддерживается Министерством обороны США и Аэрокосмическим отделением Общества автомобильных инженеров.
Одиночная шина состоит из пары проводов с сопротивлением 70–85 Ом на частоте 1 МГц. Если используется круглый разъем, его центральный контакт используется для высокого (положительного) двухфазного сигнала Манчестера. Передатчики и приемники подключаются к шине через развязывающие трансформаторы, а ответвления разветвляются с помощью пары развязывающих резисторов и, по желанию, трансформатора связи. Это снижает влияние короткого замыкания и гарантирует, что шина не будет проводить ток через самолет. Манчестер код используется для представления как часы и данные на одной и той же паре проводов и исключить любую составляющую постоянного тока в сигнале (который не может пройти трансформаторы). Скорость передачи данных составляет 1,0 мегабит в секунду (1 бит на мкс ). Суммарная точность и долговременная стабильность скорости передачи данных указаны только в пределах ± 0,1%; кратковременная стабильность часов должна быть в пределах ± 0,01%. Размах выходного напряжения передатчика составляет 18–27 В.
Шину можно сделать двойным или тройным резервированием, используя несколько независимых пар проводов, после чего все устройства подключаются ко всем шинам. Предусмотрено назначение нового управляющего компьютера шины в случае отказа текущего главного контроллера. Обычно вспомогательный компьютер управления полетом контролирует главный компьютер и датчики самолета через основную шину данных. В другой версии автобуса используется оптическое волокно, которое меньше весит и лучше сопротивляется электромагнитным помехам, в том числе ЭМИ. Это известно как MIL-STD-1773. Реализация «AS 1773» имеет двойную скорость 1 Мбит / с или 20 Мбит / с.
Система мультиплексной шины данных MIL-STD-1553 состоит из контроллера шины (BC), управляющего несколькими удаленными терминалами (RT), соединенными вместе шиной данных, обеспечивающей единый путь данных между контроллером шины и всеми связанными удаленными терминалами. Также может быть один или несколько мониторов шины (BM); однако мониторам шины специально не разрешается принимать участие в передаче данных, и они используются только для сбора или записи данных для анализа и т.д. шина данных, шина данных с тройным резервированием и т. д. Все передачи по шине данных доступны для BC и всех подключенных RT. Сообщения состоят из одного или нескольких 16-битных слов (команда, данные или статус). 16 битов, составляющих каждое слово, передаются с использованием кода Манчестера, где каждый бит передается как высокий 0,5 мкс и низкий 0,5 мкс для логической 1 или последовательность низкий-высокий для логического 0. Каждому слову предшествует синхроимпульс 3 мкс (низкий 1,5 мкс плюс 1,5 мкс высокий для слов данных и противоположный для слов команд и состояния, которые не могут встречаться в коде Манчестера), за которым следует бит нечетной четности. Практически каждое слово можно рассматривать как 20-битное слово: 3 бита для синхронизации, 16 бит для полезной нагрузки и 1 бит для контроля нечетной четности. Слова в сообщении передаются непрерывно, и между сообщениями должен быть промежуток не менее 4 мкс. Однако этот промежуток между сообщениями может быть и часто намного превышает 4 мкс, даже до 1 мс с некоторыми более старыми контроллерами шины. Устройства должны начать передачу своего ответа на действительную команду в течение 4–12 мкс, и считается, что они не получили команду или сообщение, если ответ не начался в течение 14 мкс.
Все коммуникации по шине находятся под управлением контроллера шины с использованием команд от BC к RT для приема или передачи. Последовательность слов (форма записи такая же, как lt;originatorgt;.lt;word_type(destination)gt;и у CSP ) для передачи данных от BC на терминал
и для связи между терминалом
Это означает, что во время передачи все коммуникации запускаются контроллером шины, и оконечное устройство не может начать передачу данных самостоятельно. В случае передачи RT в RT последовательность выглядит следующим образом: приложение или функция в подсистеме за интерфейсом RT (например, RT1) записывает данные, которые должны быть переданы, в конкретный (передающий) подадрес (буфер данных).). Время записи этих данных на подадрес не обязательно связано со временем транзакции, хотя интерфейсы гарантируют, что частично обновленные данные не будут переданы. Контроллер шины подает команду RT, который является адресатом данных (например, RT2), на получение данных по указанному (принимаемому) подадресу данных, а затем дает команду RT1 передать с подадреса передачи, указанного в команде. RT1 передает слово состояния, указывающее его текущий статус и данные. Контроллер шины получает слово состояния RT1 и видит, что команда передачи была получена и выполнена без проблем. RT2 принимает данные по общей шине данных, записывает их в назначенный подадрес приема и передает свое слово состояния. Затем приложение или функция в подсистеме за принимающим RT-интерфейсом может получить доступ к данным. Опять же, время этого чтения не обязательно связано со временем передачи. Контроллер шины получает слово состояния RT2 и видит, что команда приема и данные были получены и выполнены без проблем.
Однако, если RT не может передать свой статус или ожидаемые данные или указывает на проблему посредством установки битов ошибки в слове состояния, контроллер шины может повторить передачу. Для таких повторных попыток доступно несколько вариантов, включая немедленную повторную попытку (на другой шине данных резервированной пары шин данных) и повторную попытку позже (на той же шине) в последовательности передач.
Последовательности обеспечивают функционирование терминала и возможность приема данных. Слово состояния в конце последовательности передачи данных гарантирует, что данные были получены и что результат передачи данных приемлем. Именно эта последовательность обеспечивает высокую целостность стандарта MIL-STD-1553.
Однако в стандарте не указывается конкретное время для какой-либо конкретной передачи - это остается на усмотрение разработчиков системы. Обычно (как это делается на большинстве военных самолетов) у контроллера шины есть расписание передач, которое охватывает большинство передач, часто организованных в основной кадр или основной цикл, который часто подразделяется на второстепенные циклы. В такой циклической структуре исполнительного расписания передачи, которые происходят в каждом второстепенном цикле (группа скорости 1), происходят с самой высокой скоростью, обычно 50 Гц, передачи, которые происходят в каждом второстепенном цикле, из которых есть две группы (группа скорости 2.1 и 2.2) происходят со следующей по величине частотой, например 25 Гц. Точно так же есть четыре группы (3.1, 3.2, 3.3 и 3.4), например, при 12,5 Гц и так далее. Следовательно, там, где используется эта структура планирования, все передачи происходят на гармонически связанных частотах, например 50, 25, 12,5, 6,25, 3,125 и 1,5625 Гц (для основного кадра, содержащего 32 второстепенных цикла с частотой 50 Гц). Хотя RT не могут начать передачу непосредственно сами по себе, стандарт включает метод, когда RT необходимо передать данные, которые не планируются автоматически контроллером шины. Эти передачи часто называют ациклическими передачами, поскольку они находятся вне структуры, используемой циклическим исполнителем. В этой последовательности RT запрашивает передачу через бит в слове состояния, бит запроса на обслуживание. Обычно это приводит к тому, что контроллер шины передает команду режима кода режима векторного слова. Однако, если RT имеет только одну возможную ациклическую передачу, контроллер шины может пропустить эту часть. Векторное слово передается RT как одно 16-битное слово данных. Формат этого векторного слова не определен в стандарте, поэтому разработчики системы должны указать, какие значения из каких RT означают, какое действие должен предпринять контроллер шины. Это может быть запланировать ациклическую передачу сразу или в конце текущего второстепенного цикла. Это означает, что контроллер шины должен опрашивать все удаленные терминалы, подключенные к шине данных, как правило, по крайней мере, один раз в основном цикле. RT с функциями более высокого приоритета (например, те, которые работают с рулями управления самолетом) опрашиваются чаще. Функции с более низким приоритетом опрашиваются реже.
Между BC и конкретным RT или между контроллером шины и парой RT разрешены шесть типов транзакций:
MIL-STD-1553B также представил концепцию необязательной широковещательной передачи, при которой данные отправляются всем RT, которые реализуют эту опцию, но на которые RT не отвечают, поскольку это может вызвать конфликты на шине. Их можно использовать, когда одни и те же данные отправляются на несколько RT, чтобы уменьшить количество транзакций и, таким образом, уменьшить нагрузку на шину данных. Однако отсутствие явных ответов со стороны RT, получающих эти широковещательные сообщения, означает, что эти переводы не могут быть автоматически повторены в случае ошибки в транзакции.
Между BC и всеми поддерживающими RT разрешены четыре типа широковещательных транзакций:
Командное слово построено следующим образом. Первые 5 бит - это адрес удаленного терминала (0–31). Шестой бит равен 0 для приема или 1 для передачи. Следующие 5 битов указывают местоположение (подадрес) для хранения или получения данных на Терминале (1–30). Обратите внимание, что подадреса 0 и 31 зарезервированы для кодов режима. Последние 5 битов указывают количество ожидаемых слов (1–32). Все нулевые биты означают 32 слова. В случае кода режима эти биты указывают номер кода режима (например, инициировать самотестирование и передать слово BIT).
| Адрес удаленного терминала (0-31) | Получить или передать | Расположение (подадрес) данных (1-30) | Количество ожидаемых слов (1–32) | ||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
Слово состояния декодируется следующим образом. Первые 5 бит - это адрес отвечающего удаленного терминала. Остальная часть слова - это однобитовые коды условий, с некоторыми зарезервированными битами. Состояние «один» означает, что условие истинно. Одновременно может выполняться несколько условий.
| Адрес удаленного терминала | Сообщение Ошибка | Приборы | Запрос на обслуживание | Зарезервированный | Получен широковещательный Cmd | Занятый | Флаг подсистемы | Динамический прием шины | Флаг терминала | ||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
Изображение ниже иллюстрирует многие концепции протокола и физического уровня, объясненные выше. Например, адрес RT, содержащийся в командном слове, имеет значение 0x3 (в диапазоне от 0 до 31). Шестой бит равен 1, что указывает на передачу от RT. Подадрес - 0x01. Последние 5 битов указывают количество ожидаемых слов, принимающих значение 1, которому соответствует одно слово данных (значение 0x2) после слова состояния.
Также, как объяснялось выше, устройства должны начать передавать свой ответ на действительную команду в течение 4–12 микросекунд. В этом примере время отклика составляет 8,97 мкс, следовательно, в пределах спецификации. Это означает, что удаленный терминал (RT) номер 3 ответил на запрос контроллера шины после 8.97 мкс. Амплитуда запроса ниже, чем амплитуда ответа, потому что сигнал исследуется в месте, более близком к удаленному терминалу.
В слове состояния первые 5 битов - это адрес отвечающего удаленного терминала, в данном случае 0x3. Правильная передача показывает тот же адрес RT в командном слове, что и в слове состояния.
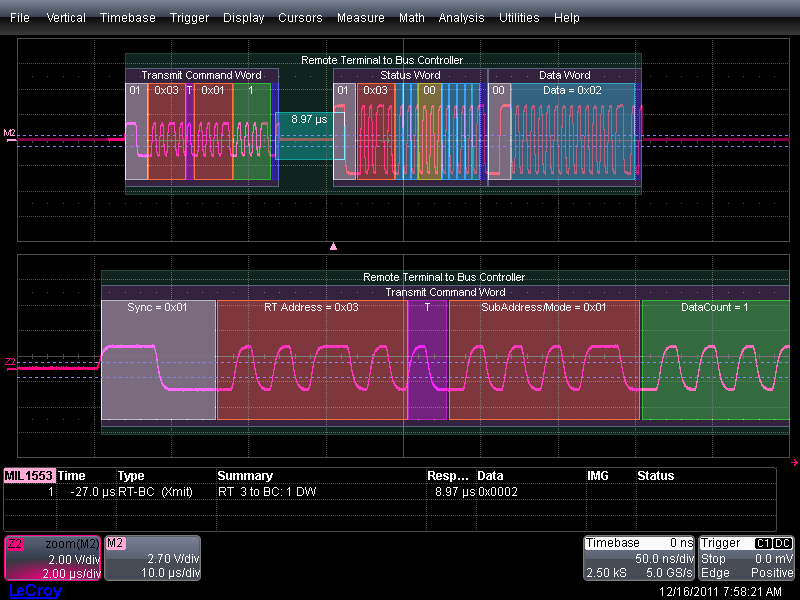
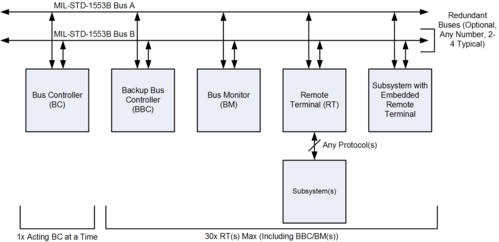 Рисунок 1: Пример архитектуры мультиплексной шины данных MIL-STD-1553B
Рисунок 1: Пример архитектуры мультиплексной шины данных MIL-STD-1553B На рисунке 1 показан образец системы MIL-STD-1553B, которая состоит из:
На любой шине MIL-STD-1553 одновременно может быть только один контроллер шины. Он инициирует передачу всех сообщений по шине.
На рисунке 1 показаны детали шины данных 1553:
Спецификация 1553B требует, чтобы все устройства в системе были подключены к резервной паре шин, чтобы обеспечить альтернативный путь данных в случае повреждения или отказа основной шины. Сообщения шины передаются только по одной шине за раз, что определяется контроллером шины.
Хотя в любой момент времени на шине может быть только один BC, стандарт предоставляет механизм для передачи обслуживания резервному контроллеру шины (BBC) или (BUBC) с использованием флагов в слове состояния и кодах режима. Это может использоваться при нормальной работе, когда передача обслуживания происходит из-за какой-либо конкретной функции, например, передачи обслуживания к или от BC, который является внешним по отношению к воздушному судну, но подключен к шине. Процедуры передачи обслуживания в условиях отказа и отказа обычно включают дискретные соединения между основным и резервным BC, а также резервный мониторинг действий основного BC во время работы. Например, если на шине имеется продолжительное бездействие, указывающее на отказ активного BC, следующий резервный BC с наивысшим приоритетом, обозначенный дискретными соединениями, вступит во владение и начнет работать как активный BC.
Монитор шины (BM) не может передавать сообщения по шине данных. Его основная роль заключается в мониторинге и записи транзакций шины без вмешательства в работу контроллера шины или RT. Эти записанные автобусные транзакции затем могут быть сохранены для последующего автономного анализа.
В идеале BM захватывает и записывает все сообщения, отправляемые по шине данных 1553. Однако запись всех транзакций на загруженной шине данных может быть непрактичной, поэтому BM часто настраивается для записи подмножества транзакций на основе некоторых критериев, предоставляемых прикладной программой.
В качестве альтернативы BM используется вместе с резервным контроллером шины. Это позволяет резервному контроллеру шины «взяться за дело», если он призван стать активным контроллером шины.
Удаленный терминал может использоваться для обеспечения:
Например, в гусеничном транспортном средстве удаленный терминал может получать данные из инерциальной навигационной подсистемы и отправлять эти данные по шине данных 1553 на другой удаленный терминал для отображения на приборе экипажа. Более простыми примерами удаленных терминалов могут быть интерфейсы, которые включают фары, посадочные огни или сигнализаторы в самолете.
Планы тестирования удаленных терминалов:
План тестирования RT Validation предназначен для проверки правильности проектирования удаленных терминалов, предназначенных для удовлетворения требований AS 15531 и MIL-STD-1553B с Уведомлением 2. Этот тестом план был первоначально определен в MIL-HDBK-1553, Приложение А. Он был обновлен в MIL-HDBK-1553A, Раздел 100. План тестирования в настоящее время поддерживается Подкомитетом по авиационным сетям SAE AS-1A как AS4111.
План производственного тестирования RT представляет собой упрощенное подмножество плана проверочного тестирования и предназначен для производственного тестирования удаленных терминалов. Этот план тестирования поддерживается Подкомитетом по авиационным сетям SAE AS-1A как AS4112.
Аппаратное обеспечение шины включает (1) кабельную разводку, (2) шинные соединители, (3) терминаторы и (4) соединители.
Промышленность стандартизировала тип кабеля как твинаксиальный кабель с характеристическим сопротивлением 78 Ом, что почти соответствует среднему значению диапазона технических характеристик от 70 до 85 Ом.
MIL-STD-1553B не указывает длину кабеля. Однако максимальная длина кабеля напрямую зависит от толщины жилы кабеля и временной задержки передаваемого сигнала. Проводник меньшего размера ослабляет сигнал больше, чем проводник большего размера. Типичная задержка распространения для кабеля 1553B составляет 1,6 наносекунды на фут. Таким образом, сквозная 100-футовая шина (30 м) будет иметь задержку распространения 160 наносекунд, что равно среднему времени нарастания сигнала 1553B. Согласно MIL-HDBK-1553A, когда время задержки распространения сигнала составляет более 50% времени нарастания или спада, необходимо учитывать влияние линии передачи. Это время задержки пропорционально пройденному расстоянию. Кроме того, необходимо учитывать фактическое расстояние между передатчиком и приемником и индивидуальные характеристики формы сигнала передатчиков и приемников.
MIL-STD-1553B указывает, что самая длинная длина шлейфа составляет 20 футов (6,1 м) для шлейфов с трансформаторной связью, но может быть превышена. Без шлейфов основная шина выглядит как линия передачи бесконечной длины без мешающих отражений. Когда добавляется заглушка, шина загружается, и возникает несоответствие с результирующими отражениями. Степень рассогласования и искажения сигнала из-за отражений является функцией импеданса, представленного входным сопротивлением шлейфа и клеммы. Чтобы минимизировать искажение сигнала, желательно, чтобы шлейф сохранял высокий импеданс. Этот импеданс отражается обратно в шину. В то же время, однако, импеданс должен быть низким, чтобы на приемный конец передавалась соответствующая мощность сигнала. Следовательно, необходим компромисс между этими противоречивыми требованиями для достижения заданного отношения сигнал / шум и производительности системы по частоте ошибок (дополнительную информацию см. В MIL-HDBK-1553A).
Каждый терминал RT, BC или BM подключается к шине через шлейф, образованный из отрезка кабеля того же типа, что и сама шина. MIL-STD-1553B определяет два способа подключения этих шлейфов к шине: шлейфы с трансформаторной связью и шлейфы с прямым подключением. Шлейфы с трансформаторной связью предпочтительны из-за их отказоустойчивости и лучшего согласования с импедансом шины и, как следствие, уменьшения отражений и т. Д. В приложении к MIL-STD-1553B (в разделе 10.5, Шлейф) говорится: для использования шлейфов с трансформаторной связью… Этот метод обеспечивает преимущества изоляции по постоянному току, повышенного подавления синфазных помех, удвоения эффективного импеданса шлейфа и изоляции короткого замыкания для всего шлейфа и клеммы. Прямых шлейфов... следует избегать, если это вообще возможно. соединенные шлейфы не обеспечивают изоляцию по постоянному току или подавление синфазного сигнала для терминала, внешнего по отношению к его подсистеме. Кроме того, любое короткое замыкание между внутренними изоляционными резисторами [sic] подсистем (обычно на печатной плате) и соединением главной шины вызовет выход из строя всего этого Можно ожидать, что, когда длина напрямую связанного шлейфа превысит 1,6 фута [0,5 метра], он начнет искажать формы волны основной шины ».
Использование заглушек с трансформаторной связью также обеспечивает улучшенную защиту клемм 1553 от ударов молнии. Изоляция еще более критична в новых самолетах из композитных материалов, где обшивка самолета больше не обеспечивает присущий ему щит Фарадея, как это было в случае с самолетами с алюминиевой обшивкой.
В ответвлении с трансформаторной связью длина ответвительного кабеля не должна превышать 20 футов (6,1 м), но она может быть превышена, «если того требуют требования по установке». Трансформатор связи должен иметь коэффициент трансформации 1: 1,41 ± 3,0 процента. Оба резистора R должны иметь значение 0,75 Zo ± 2,0 процента, где Zo - характеристическое сопротивление шины на частоте 1 МГц.
 Рисунок 10: Интерфейс шины данных с использованием прямого подключения
Рисунок 10: Интерфейс шины данных с использованием прямого подключения В отрезке с прямым соединением длина отрезка кабеля не должна превышать 1 фут, но, опять же, она может быть превышена, если того требуют требования по установке. Изолирующие резисторы R должны иметь фиксированное значение 55 Ом ± 2,0 процента.
Шлейфы для RT, BC или BM обычно подключаются к шине через соединительные коробки, которые могут обеспечивать одно или несколько ответвлений. Они обеспечивают необходимое экранирование (≥ 75%), а для ответвлений с трансформаторной связью содержат трансформаторы связи и разделительные резисторы. У них есть два внешних разъема, через которые питается шина, и один или несколько внешних разъемов, к которым подключаются шлейфы или шлейфы. Эти штекерные соединители не должны заканчиваться соответствующими резисторами, а оставлять разомкнутую цепь, когда они не используются, с заглушками, если необходимо. Один из шинных соединителей может быть оконцован там, где шинный соединитель физически находится на конце шинного кабеля, т. Е. Обычно не считается необходимым иметь длину шинного кабеля между последним шинным соединителем и согласующим резистором.
Оба конца шины, независимо от того, включает ли она один соединитель или ряд соединителей, соединенных вместе, должны быть оконцованы (в соответствии со стандартом MIL-STD-1553B) с сопротивлением, равным выбранному номинальному характеристическому сопротивлению кабеля (Zo) ± 2,0. процентов." Обычно это 78 Ом. Назначение электрического терминирования - свести к минимуму эффекты отражений сигнала, которые могут вызвать искажение формы волны. Если завершения не используются, сигнал связи может быть нарушен, вызывая прерывание или периодические сбои связи.
Стандарт не определяет типы разъемов или способ их подключения, кроме требований к экранированию и т. Д. В лабораторных условиях обычно используются концентрические двухосные байонетные разъемы. Эти разъемы доступны в стандартных ( размер BNC ), миниатюрных и субминиатюрных размерах. В военных самолетах обычно используются круглые разъемы MIL-DTL-5015 и MIL-DTL-38999.
DIGIBUS (или Digibus) является французским эквивалентом MIL-STD-1553 и похож на MIL-STD-1553 в том же понятии контроллера шины, удаленного терминала, монитора, одинаковой скорости передачи, но разница в том, что DIGIBUS использует отдельные ссылки для данных и команд.
GJV289A - китайский эквивалент MIL-STD-1553.
ГОСТ 26765.52-87 и ГОСТ Р 52070-2003 являются советским и российским эквивалентами соответственно MIL-STD-1553.
При разработке или устранении неисправностей для MIL-STD-1553 полезно изучить электронные сигналы. Логический анализатор с возможностью декодирования протокола, также анализатор шины или протоколом анализатором, являются полезными инструментами для сбора, анализа, декодирования и сохранения формы сигналов электронных высокоскоростных сигналов.