
Войти
 Типичный трехфазный линейный асинхронный двигатель. «Первичный» сердечник (серый) имеет пазы, и в них уложены друг на друга обмотки. Алюминиевая пластина выше (не показана) служит «вторичной» и будет перемещаться относительно первичной обмотки, если применяется трехфазный переменный ток.
Типичный трехфазный линейный асинхронный двигатель. «Первичный» сердечник (серый) имеет пазы, и в них уложены друг на друга обмотки. Алюминиевая пластина выше (не показана) служит «вторичной» и будет перемещаться относительно первичной обмотки, если применяется трехфазный переменный ток.  Линейный асинхронный двигатель с поперечным потоком (здесь первичная обмотка вверху изображения) и имеет два наборы противоположных полюсов бок о бок. (Изображение из патента США 3824414, автор Эрика Лэйтуэйта )
Линейный асинхронный двигатель с поперечным потоком (здесь первичная обмотка вверху изображения) и имеет два наборы противоположных полюсов бок о бок. (Изображение из патента США 3824414, автор Эрика Лэйтуэйта )A линейный асинхронный двигатель (LIM ) - это асинхронный линейный двигатель переменного тока (AC)., который работает по тем же общим принципам, что и другие асинхронные двигатели, но обычно предназначен для непосредственного движения по прямой линии. Как правило, линейные асинхронные двигатели имеют конечную длину первичной или вторичной обмотки, что создает конечную эффектов, тогда как обычный асинхронный двигатель расположен в бесконечной петле.
Несмотря на свое название, не все линейные асинхронные двигатели производят линейное движение; некоторые линейные асинхронные двигатели используются для вращения большого диаметра, когда используется непрерывная первичная обмотка обойдется очень дорого.
Как и в случае с роторными двигателями, линейные двигатели часто работают от трехфазного источника питания и могут поддерживать очень высокие скорости. Однако есть конечные эффекты, которые уменьшают силу двигателя, и Часто невозможно установить коробку передач, чтобы сбалансировать силу и скорость. Таким образом, линейные асинхронные двигатели часто менее энергоэффективны, чем обычные роторные двигатели для любой заданной требуемой выходной силы.
LIM, в отличие от своих поворотных аналогов, может давать эффект левитации. Поэтому они часто используются там, где требуется бесконтактное усилие, где требуются низкие эксплуатационные расходы или где рабочий цикл невелик. Их практическое применение включает магнитную левитацию, линейные двигатели и линейные приводы. Они также использовались для перекачивания жидких металлов.
Историю линейных электродвигателей можно проследить, по крайней мере, с 1840-х годов до работа Чарльза Уитстона в Королевском колледже в Лондоне, но модель Уитстона была слишком неэффективной, чтобы быть практичной. Возможный линейный асинхронный двигатель описан в патенте США 782312 (1905; изобретатель Альфред Цеден из Франкфурта-на-Майне) и предназначен для приведения в движение поездов или лифтов. Немецкий инженер Герман Кемпер построил рабочую модель в 1935 году. В конце 1940-х годов профессор Эрик Лейтвейт из Имперского колледжа в Лондоне разработал первая полноразмерная рабочая модель.
 FEMM-моделирование поперечного сечения магнитной реки, окрашенное плотностью электрического тока
FEMM-моделирование поперечного сечения магнитной реки, окрашенное плотностью электрического тока В одностороннем варианте магнитное поле может создавать силы отталкивания, которые отталкивают проводник от статора, левитируя его и перенося по направлению движущегося магнитного поля. Лэйтуэйт назвал более поздние версии магнитной рекой. В этих версиях линейного асинхронного двигателя используется принцип, называемый поперечным потоком, при котором два противоположных полюса размещаются рядом. Это позволяет использовать очень длинные полюса и, таким образом, обеспечивает высокую скорость и эффективность.
Первичная обмотка линейного электродвигателя обычно состоит из плоского магнитного сердечника (обычно ламинированного) с поперечными пазами, которые часто имеют прямой разрез с катушками, уложенными в прорези, причем каждая фаза дает чередующуюся полярность, так что разные фазы физически перекрываются.
Вторичный часто лист из алюминия, часто с железной опорной плиты. Некоторые модули LIM являются двухсторонними, с одной первичной обмоткой на каждой стороне вторичной, и в этом случае железная подкладка не требуется.
Существует два типа линейных двигателей: короткая первичная обмотка, где катушки усечены короче вторичной обмотки, и короткая вторичная обмотка, где токопроводящая пластина меньше. Короткие вторичные LIM часто наматываются как параллельные соединения между катушками одной и той же фазы, тогда как короткие первичные обмотки обычно наматываются последовательно.
Первичные обмотки LIM с поперечным потоком имеют серию сдвоенных полюсов, расположенных поперек бок о бок с противоположными направлениями намотки. Эти полюса, как правило, производится либо с соответствующим образом вырезать пластины ламинированной подложки или серией поперечных U-образные сердечники.
 Магнитное поле линейного двигателя движется влево мимо алюминиевого блока. Окрашено индуцированным электрическим током.
Магнитное поле линейного двигателя движется влево мимо алюминиевого блока. Окрашено индуцированным электрическим током. В этой конструкции электродвигателя сила создается линейно движущимся магнитным полем, действующим на проводники в поле. Любой проводник, будь то петля, катушка или просто кусок металлической пластины, помещенный в это поле, будет иметь вихревые токи индуцированные, создавая, таким образом, противоположное магнитное поле. в соответствии с законом Ленца. Два противостоящих поля будут отталкивать друг друга, создавая движение, когда магнитное поле пронизывает металл.

где f s - частота питания в Гц, p - количество полюсов, и n s - синхронная скорость магнитного поля в оборотах в секунду.
Шаблон бегущего поля имеет скорость:

, где v s - скорость линейное бегущее поле в м / с, а t - шаг полюсов.
Для скольжения s скорость вторичной обмотки линейного двигателя определяется как

 Тяга, создаваемая как функция скольжения
Тяга, создаваемая как функция скольжения Привод, создаваемый линейными асинхронными двигателями, в чем-то похож на обычные асинхронные двигатели; движущие силы показывают примерно аналогичную характеристическую форму относительно скольжения, хотя и модулируются концевыми эффектами.
Существуют уравнения для расчета тяги двигателя.
В отличие от Круглый асинхронный двигатель, линейный асинхронный двигатель демонстрирует «конечные эффекты». Эти конечные эффекты включают в себя потери производительности и эффективности, которые, как считается, вызваны уносом магнитной энергии и потерями в конце первичной обмотки из-за относительного движения первичной и вторичной обмоток.
С короткой вторичной обмоткой поведение почти идентично роторной машине, при условии, что она имеет длину как минимум два полюса, но с коротким первичным уменьшением тяги, которое происходит при малом скольжении (ниже примерно 0,3) до тех пор, пока восемь полюсов и более.
Однако из-за концевых эффектов линейные двигатели не могут «работать на малой мощности» - обычные асинхронные двигатели могут управлять двигателем с почти синхронным полем в условиях низкой нагрузки. В отличие от линейных двигателей, конечные эффекты создают гораздо более значительные потери.
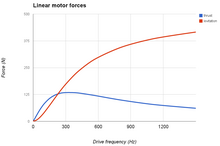 Кривые левитации и силы тяги линейного двигателя
Кривые левитации и силы тяги линейного двигателя Кроме того, в отличие от роторного двигателя, электродинамическая левитация Показана сила, она равна нулю при нулевом скольжении и дает примерно постоянную величину силы / зазора при увеличении скольжения в любом направлении. Это происходит в односторонних двигателях, и левитация обычно не возникает, когда на вторичной обмотке используется железная опорная плита, поскольку это вызывает притяжение, которое подавляет подъемную силу.
Часто используются линейные асинхронные двигатели. менее эффективен, чем обычные роторные асинхронные двигатели; Концевые эффекты и часто присутствующий относительно большой воздушный зазор обычно уменьшают силы, возникающие при той же самой электрической мощности. Аналогичным образом, эффективность во время работы генератора (электрическое торможение / рекуперация) с линейным асинхронным двигателем была отмечена как относительно низкая из-за конечных эффектов. Большой воздушный зазор также увеличивает индуктивность двигателя, что может потребовать больших и более дорогих конденсаторов.
Однако линейные асинхронные двигатели могут избежать необходимости в редукторах и аналогичных трансмиссиях, и они имеют свои собственные потери; а практическое знание важности фактора качества может минимизировать влияние большего воздушного зазора. В любом случае использование мощности не всегда является самым важным соображением. Например, во многих случаях линейные асинхронные двигатели имеют гораздо меньше движущихся частей и требуют очень низкого обслуживания. Кроме того, использование линейных асинхронных двигателей вместо вращающихся двигателей с поворотно-линейной передачей в системах управления движением обеспечивает более широкую полосу пропускания и точность системы управления , поскольку поворотно-линейный трансмиссии вызывают люфт, статическое трение и / или механическую податливость в системе управления.
 Линейный индукционный двигатель LIMTV в 1973 г.
Линейный индукционный двигатель LIMTV в 1973 г. Из-за этих свойств линейные двигатели часто используются в силовых установках maglev, как в японском Linimo поезд на магнитной подушке линия около Нагоя.
 Аэропорт Бирмингема Шаттл на маглеве
Аэропорт Бирмингема Шаттл на маглеве Первой в мире коммерческой автоматизированной системой магнитолевого управления был низкоскоростной маглев. шаттл, который курсировал от терминала аэропорта аэропорта Бирмингема до ближайшей международной железнодорожной станции Бирмингема в период с 1984 по 1995 год. Длина пути составляла 600 метров (2000 футов), а поезда «летели» на высоте 15 миллиметров (0,59 дюйма), левитировали с помощью электромагнитов и приводились в движение линейными асинхронными двигателями. Он находился в эксплуатации почти одиннадцать лет, но устаревание электронных систем сделали его ненадежным в последующие годы. Один из оригинальных вагонов теперь демонстрируется на Railworld в Питерборо вместе с парящим поездом RTV31.
Однако линейные двигатели использовались независимо от магнитной левитации, например, Tokyo 's Toei edo Line. Bombardier Innovia Metro является примером автоматизированной системы, в которой используется тяга LIM. Самая протяженная система скоростного транспорта, использующая такую технологию, - это метро Гуанчжоу, с примерно 130 км (81 милей) маршрута с использованием поездов метро LIM по линии 4, Строка 5 и Строка 6. Они также используются Tomorrowland Transit Authority PeopleMover в Tomorrowland в Magic Kingdom в Walt Disney World Resort в Bay Озеро, Флорида недалеко от Орландо, Флорида.
Технология линейных асинхронных двигателей также используется в некоторых американских горках. В настоящее время это все еще непрактично на уличных трамваях трамваях, хотя теоретически это можно сделать, закопав их в канализацию с прорезями.
 Поезда AirTrain JFK передвигаются с помощью алюминиевой индукционной ленты, помещенной между рельсами.
Поезда AirTrain JFK передвигаются с помощью алюминиевой индукционной ленты, помещенной между рельсами. За пределами общественного транспорта вертикальные линейные двигатели были предложены в качестве подъемных механизмов в глубоких шахтах, а Использование линейных двигателей в приложениях управления движением растет. Они также часто используются на раздвижных дверях, например, низкопольных трамваев, таких как Alstom Citadis и Eurotram.
Dual Axe. линейные двигатели также существуют. Эти специализированные устройства используются для обеспечения прямого движения по оси X-Y для прецизионной лазерной резки ткани и листового металла, автоматизированного черчения и формирования кабеля. Кроме того, линейные асинхронные двигатели с цилиндрической вторичной обмоткой использовались для обеспечения одновременного линейного и вращательного движения для монтажа электронных устройств на печатных платах.
Большинство используемых линейных двигателей - это LIM (линейные асинхронные двигатели) или LSM (линейные асинхронные двигатели). синхронные двигатели). Линейные двигатели постоянного тока не используются, поскольку они более дорогостоящие, а линейный SRM страдает недостаточной тягой. Таким образом, для длительных пробегов на тяговых усилиях предпочтительнее использовать LIM, а для краткосрочных - LSM.
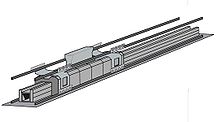 Схема асинхронного двигателя EMALS
Схема асинхронного двигателя EMALS Линейные асинхронные двигатели также использовались для запуска самолетов, система Westinghouse Electropult в 1945 году была ранним примером, а электромагнитная система запуска самолетов (EMALS) была должны быть поставлены в 2010 году.
Линейные асинхронные двигатели также используются в ткацких станках, магнитная левитация позволяет катушкам плавать между волокнами без прямого контакта.
Первый безканатный лифт , изобретенный ThyssenKrupp, использует мощность привода с линейной индукцией.