В дифференциальной топологии связка струй представляет собой определенную конструкцию, которая создает новую гладкий пучок волокон из заданного гладкого пучка волокон. Это позволяетывать дифференциальные уравнения записывать на участках пучка волокон в инвариантной форме. Струи также можно рассматривать как свободные от координат версии расширений Тейлора.
Исторически связки струй приписывались Чарльзу Эресманну и были продвижением методом (продолжение ) Эли Картана, геометрической работы с высшими производными путем наложения условий дифференциальной на вновь введенные формальные переменные. Пучки струй иногда называют спреями, хотя спреи обычно более конкретно к ассоциированному векторному полю, наведенному на соответствующий пучок (например, геодезический спрей на финслеровских разнообразиях.)
С начала 1980-х годов струйные пучки появились как краткий способ описания явлений, связанных с производными карт, особенно тех, которые связаны с вариационное исчисление. Следовательно, расслоение струй теперь признано правильной областью для геометрической ковариантной теории поля, и большая работа проделана в общих релятивистских формулировках полей с использованием этого подхода.
Содержание
- 1 Форсунки
- 2 Форсунки
- 3 Жгуты форсунок
- 3.1 Алгебро-геометрическая перспектива
- 3.2 Пример
- 4 Структура контактов
- 5 Вектор поля
- 6 Уравнения с частными производными
- 7 Удлинение струи
- 8 Бесконечные пространства для струй
- 8.1 Бесконечно протяженные УЧП
- 9 Примечание
- 10 См. также
- 11 Ссылки
- 12 Дополнительная литература
Jets
Предположим, что M - это m-мерное многообразие и что (E, π, M) - пучок волокон . Для p ∈ M через Γ (p) обозначим множество всех локальных секций, область определения которых содержит p. Пусть  быть мультииндексом (набором m целых чисел, не обязательно в возрастании), затем определите:
быть мультииндексом (набором m целых чисел, не обязательно в возрастании), затем определите:

Определите локальные сечения σ, η ∈ Γ (p) так, чтобы они имели одинаковую r-струю в точке p, если

Отношение, что две карты имеют одну и ту же r-струю, является отношением эквивалентности. В соответствии с этим использованием r-струя является классом эквивалентности, а r-струя с представительным σ обозначается  . Целое число r также называется порядком струи, p - ее со ссылкой на, а σ (p) - ее .
. Целое число r также называется порядком струи, p - ее со ссылкой на, а σ (p) - ее .
Коллекторы струи
r-м разнообразием струй множества π является множеством

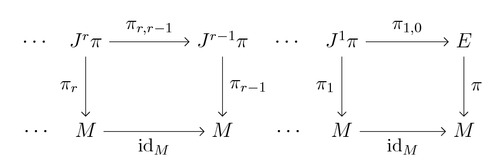
Мы можем определить проекции π r и π r, 0, называемые исходной и проекциями соответственно, как

1 ≤ k ≤ r, то k- проекция струи - это функция π r, k, определенная как

Из этого определения ясно, что π r = π o πr, 0 и что если 0 ≤ m ≤ k, тогда π r, m = π k, m o πг, к. Принято рассматривать π r, r как тождественное отображение на J (π) и отождествлять J (π) с E.
Функции π r, k, π r, 0 и π r - это плавные цели погружения.
A система координат на E создаст систему координат на J (π). Пусть (U, u) - адаптированная координатная карта на E, где u = (x, u). индуцированная координатная карта (U, u) на J (π) означает как

где

и  функции, известные как координаты производной :
функции, известные как координаты производной :

Учитывая атлас адаптированных карт (U, u) на E, соответствующий набор карт (U, u) является конечным C-атласом на J (π).
Связки струй
Горнолыжный атлас на каждом J (π) многообразие, тройки (J (π), π r, k, J (π)), ( J (π), π r, 0, E) и (J (π), π r, M) все определяют расслоенные многообразия. В частности, если (E, π, M) - расслоение слоев, тройка (J (π), π r, M) определяет r-й пучок струй для π .
Если W ⊂ M - открытое подмногообразие, то

Если p ∈ M, то волокно  обозначается
обозначается  .
.
Пусть σ - локальное сечение π с областью определения W ⊂ M. r-ое продолжение струи σ - это отображение jσ: W → J (π), определенное формулой

Обратите внимание, что π ro jσ = id W, так что jσ действительно является разделом. В локальных координатах jσ задается как

Мы отождествляем jσ с σ.
Алгебро-геометрическая перспектива
Независимо мотивированное построение связки секций  дано.
дано.
Рассмотрим диагональное отображение  , где гладкое многообразие
, где гладкое многообразие  является локально окольцованным пространством на
является локально окольцованным пространством на  для каждого открытого
для каждого открытого  . Пусть
. Пусть  будет идеальным пучком для
будет идеальным пучком для  , пусть будет связкой гладких ростков, которые исчезают на для всех
, пусть будет связкой гладких ростков, которые исчезают на для всех
прямой предел следовать инъекций, задаваемых каноническими включениями  пучков, приводит к бесконечному пучку струй
пучков, приводит к бесконечному пучку струй  . Заметим, что по построению прямого предела это фильтрованное кольцо.
. Заметим, что по построению прямого предела это фильтрованное кольцо.
Пример
Если π является тривиальным набором (M × R, pr 1, M), тогда там каноническим диффеоморфизмом между первым пучком струй J (π) и T * M × R . Чтобы построить этот диффеоморфизм, для каждого σ в Γ M (π) напишите  .
.
Тогда, если p ∈ M

Следовательно, отображение

четко определен и явно инъективен. Запись в координатах показывает, что это диффеоморфизм, потому что если (x, u) - координаты на M × R, где u = id R- единичные координаты, то производные координаты u i на J (π) координатам ∂ i на T * M.
Аналогично, если π - тривиальное расслоение (R × M, pr 1, R), то существует канонический диффеоморфизм между J (π) и R × TM.
Контактная структура
Пространство J (π) несет естественное распределение, то есть под-расслоение касательного тела TJ (π)), называемое распределением Картана. Распределение Картана натянуто на все касательные плоскости к графам голономных сечений; то есть сечения вида jφ для φ сечения π.
Аннигилятор распределения Картана - это пространство дифференциальных одноформ, называемых контактными формами, на J (π). Пространство дифференциальных одноформ на J (π) обозначается  а пространство контактных форм обозначается
а пространство контактных форм обозначается  . Единичная форма является контактной, если ее откат при каждом продлении равенство нулю. Другими словами,
. Единичная форма является контактной, если ее откат при каждом продлении равенство нулю. Другими словами,  является контактной формой тогда и только тогда, когда
является контактной формой тогда и только тогда, когда

для всех локальных участков σ из π над М.
Распределение Картана является основной геометрической структурой на пространствех уравнения в частных производных. Распределения Картана полностью не интегрируемы. В частности, они не инволютивные. Размер распределения Картана растет с порядком пространства струи. Однако в пространстве бесконечных струй J распределение Картана становится инволюционным и конечным: его размер совпадает с размером базового многообразия M.
Пример
Рассмотрим случай (E, π, M), где E ≃ R и M R . Тогда (J (π), π, M) определяет первое расслоение струй и может быть скоординировано с помощью (x, u, u 1), где

для всех p ∈ M и σ в Γ p (π). Общая 1-форма на J (π) принимает вид

Сечение σ в Γ p (π) имеет первое продолжение

Следовательно, (jσ) * θ можно вычислить как
![{\displaystyle {\begin{aligned}\left(j_{p}^{1}\sigma \right)^{*}\theta =\theta \circ j_{p}^{1}\sigma \\=a(x,\sigma (x),\sigma '(x))dx+b(x,\sigma (x),\sigma '(x))d(\sigma (x))+c(x,\sigma (x),\sigma '(x))d(\sigma '(x))\\=a(x,\sigma (x),\sigma '(x))dx+b(x,\sigma (x),\sigma '(x))\sigma '(x)dx+c(x,\sigma (x),\sigma '(x))\sigma ''(x)dx\\=[a(x,\sigma (x),\sigma '(x))+b(x,\sigma (x),\sigma '(x))\sigma '(x)+c(x,\sigma (x),\sigma '(x))\sigma ''(x)]dx\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/30a959d2fa3a6248866a919b98d607dea8e76829)
Это исчезнет для всех секций σ тогда и только тогда, когда c = 0 и a = −bσ ′ (x). Следовательно, θ = b (x, u, u 1)θ0обязательно должно быть кратным основной контактной формой θ 0 = du - u 1 dx. Переход ко второй струе пространство J (π) с дополнительной координатой u 2, такое что

общая 1-форма имеет конструкцию

Это контактная форма тогда и только тогда, когда
![{\displaystyle {\begin{aligned}\left(j_{p}^{2}\sigma \right)^{*}\theta =\theta \circ j_{p}^{2}\sigma \\=a(x,\sigma (x),\sigma '(x),\sigma ''(x))dx+b(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma (x))+{}\\\qquad \qquad c(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma '(x))+e(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma ''(x))\\=adx+b\sigma '(x)dx+c\sigma ''(x)dx+e\sigma '''(x)dx\\=[a+b\sigma '(x)+c\sigma ''(x)+e\sigma '''(x)]dx\\=0\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/11dfc307319b49dd700c8bf6df06a16de4993719)
, что означает, что e = 0 и a = −bσ ′ (x) - cσ ′ ′ (x). Следовательно, θ является контактной формой тогда и только тогда, когда

где θ 1 = du 1 - u 2 dx - это следующая основная контактная форма (обратите внимание, что здесь мы идентифицируем форму θ 0 с ее откатом  в Дж (π)).
в Дж (π)).
В общем случае, если x, u ∈ R, контактная форма на J (π) может быть записана как линейная комбинация линейная комбинация основных форм

где

Подобные аргументы приводят к полной характеристике всех контактных форм.
В локальных координатах каждая контактная форма на J (π) может быть записана как линейная комбинация

с гладкими коэффициентами  основных контактных форм
основных контактных форм

| Я | известен как порядок контактной формы  . Отметим, что контактные формы на J (π) имеют порядки не выше r. Контактные формы характеристики тех локальных участков π r + 1, которые являются продолжением участков π.
. Отметим, что контактные формы на J (π) имеют порядки не выше r. Контактные формы характеристики тех локальных участков π r + 1, которые являются продолжением участков π.
Пусть ψ ∈ Γ W(πr + 1), тогда ψ = jσ, где σ ∈ Γ W (π) тогда и только тогда, когда 
Векторные поля
Общее векторное поле на всем пространстве E, координируемое с помощью  , равно
, равно

векторное поле называется горизонтальным, что означает что все вертикальные коэффициенты равны нулю, если  = 0.
= 0.
Векторное поле называется вертикальным, что означает, что все горизонтальные коэффициенты обращаются в нуль, если ρ = 0.
Для фиксированного (x, u) мы отождествляем

, имеющий координаты (x, u, ρ, φ), с элементом в волокне T xu E TE над (x, u) в E, называемым a касательный вектор в TE . Раздел

называется векторным полем на E с

и ψ в Γ (TE).
Пучок струй J (π) координируется с помощью  . Для фиксированных (x, u, w) отождествляем
. Для фиксированных (x, u, w) отождествляем

с координатами

с элементом в волокне  из TJ (π) над (x, u, w) ∈ J (π), называемый касательным вектором в TJ (π) . Здесь
из TJ (π) над (x, u, w) ∈ J (π), называемый касательным вектором в TJ (π) . Здесь

- функции с действительными значениями на J (π). Раздел

равно Векторное поле на J (π), и мы говорим 
Уравнения в частных производных
Пусть (E, π, M) - пучок волокон. Уравнение в частных производных r-го порядка на π является замкнутым вложенным подмногообразием S многообразия струй J (π). Решение - это локальное сечение σ ∈ Γ W (π), удовлетворяющее  , для всех p в M.
, для всех p в M.
Рассмотрим пример уравнения в частных производных первого порядка.
Пример
Пусть π будет тривиальным набором (R× R, pr 1, R) с глобальными координатами (x, x, u). Тогда карта F: J (π) → R определяется как

дает начало дифференциальному уравнению

который можно записать как

Частное

имеет первое продолжение, рав ное

и является решением этого дифференциального уравнения, поскольку

и поэтому  для каждого p ∈ R.
для каждого p ∈ R.
удлинение струи
Локальный диффеоморфизм ψ: J (π) → J (π) определяет контактное преобразование порядка r, если он сохраняет контактный идеал, что означает, что если θ - любая контактная форма на J (π), то ψ * θ также является контактной формой.
Поток, генерируемый векторным полем V на пространстве джетов J (π), образует однопараметрическую группу контактных преобразований тогда и только тогда, когда производная Ли  любой контактной формы θ сохраняет контактный идеал.
любой контактной формы θ сохраняет контактный идеал.
Начнем с дела первого порядка. Рассмотрим общее векторное поле V на J (π), задаваемое формулой

Теперь применим  к основным контактным формам
к основным контактным формам  и развернуть внешнюю производную функций в терминах их координат, чтобы получить:
и развернуть внешнюю производную функций в терминах их координат, чтобы получить:
![{\ displaystyle {\ begin {align} {\ mathcal {L}} _ {V ^ { 1}} \ left (\ theta _ {0} ^ {\ alpha} \ right) = {\ mathcal {L}} _ {V ^ {1}} \ left (du ^ {\ alpha} -u_ {i } ^ {\ alpha} dx ^ {i} \ right) \\ = {\ mathcal {L}} _ {V ^ {1}} du ^ {\ alpha} - \ left ({\ mathcal {L}} _ {V ^ {1}} u_ {i} ^ {\ alpha} \ right) dx ^ {i} -u_ {i} ^ {\ alpha} \ left ({\ mathcal {L}} _ {V ^ {1}} dx ^ {i} \ right) \\ = d \ left (V ^ {1} u ^ {\ alpha} \ справа) -V ^ {1} u_ {i} ^ {\ alpha} dx ^ {i} -u_ {i} ^ {\ alpha} d \ left (V ^ {1} x ^ {i} \ right) \ \ = d \ phi ^ {\ alpha} - \ chi _ {i} ^ {\ alpha} dx ^ {i } -u_ {i} ^ {\ alpha} d \ rho ^ {i} \\ = {\ frac {\ partial \ phi ^ {\ alpha}} {\ partial x ^ {i}}} dx ^ {i } + {\ frac {\ partial \ phi ^ {\ alpha}} {\ partial u ^ {k}}} du ^ {k} + {\ frac {\ partial \ phi ^ {\ alpha}} {\ partial u_ {i} ^ {k}}} du_ {i} ^ {k} - \ chi _ {i} ^ {\ alpha} dx ^ {i} -u_ {i} ^ {\ alpha} \ left [{\ frac {\ partial \ rho ^ {i}} {\ partial x ^ {m}}} dx ^ {m} + {\ frac {\ partial \ rho ^ {i}} {\ partial u ^ {k}}} du ^ {k} + {\ frac {\ partial \ rho ^ {i}} {\ partial u_ {m} ^ {k}}} du_ {m} ^ {k} \ справа] \\ = {\ frac { \ partial \ phi ^ {\ alpha}} {\ частичный x ^ {i}}} dx ^ {i} + {\ frac {\ partial \ phi ^ {\ alpha}} {\ partial u ^ {k}}} \ left (\ theta ^ {k} + u_ { i} ^ {k} dx ^ {i} \ right) + {\ frac {\ partial \ phi ^ {\ alpha}} {\ partial u_ {i} ^ {k}}} du_ {i} ^ {k} - \ chi _ {i} ^ {\ alpha} dx ^ {i} -u_ {l} ^ {\ alpha} \ left [{\ frac {\ partial \ rho ^ {l}} {\ partial x ^ {i }}} dx ^ {i} + {\ frac {\ partial \ rho ^ {l}} {\ partial u ^ {k}}} \ left (\ theta ^ {k} + u_ {i} ^ {k} dx ^ {i} \ right) + {\ frac {\ partial \ rho ^ {l}} {\ partial u_ {i} ^ {k}}} du_ {i} ^ {k} \ right] \\ = \ left [{\ frac {\ partial \ phi ^ {\ alpha}} {\ partial x ^ {i}}} + {\ frac {\ partial \ phi ^ {\ alpha}} {\ partial u ^ {k} }} u_ {i} ^ {k} -u_ {l} ^ {\ alpha} \ left ({\ frac {\ частичный \ rho ^ {l}} {\ partial x ^ {i}}} + {\ frac {\ partial \ rho ^ {l}} {\ partial u ^ {k}}} u_ {i} ^ {k} \ right) - \ chi _ {i} ^ {\ alpha} \ right] dx ^ {i } + \ left [{\ frac {\ partial \ phi ^ {\ alpha}} {\ partial u_ {i} ^ {k}}} - u_ {l} ^ {\ alpha} {\ frac {\ partial \ rho ^ {l}} {\ partial u_ {i} ^ {k}}} \ right] du_ {i} ^ {k} + \ left ({\ frac {\ partial \ phi ^ {\ alpha }} {\ частичное u ^ {k}}} - u_ {l} ^ {\ alpha} {\ frac {\ partial \ rho ^ {l}} {\ partial u ^ {k}}} \ right) \ theta ^ {k} \ end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0151abaeb6a895d4256232079c3335749fb77ea7)
Следовательно, V определяет преобразование контакта тогда и только тогда, когда коэффициенты при dx и  в формуле исчезают. Последние требования подразумевают условия контакта
в формуле исчезают. Последние требования подразумевают условия контакта

Первые требования предусматривают явные формулы для коэффициентов членов первой производной в V:

где

обозначает усечение нулевого порядка полной производной D i.
Таким образом, условия контакта однозначно предписывают продолжение любого точечного или контактного векторного поля. То есть, если  удовлетворяет этим уравнениям, V называется r-м продолжением V в векторное поле на J (π) .
удовлетворяет этим уравнениям, V называется r-м продолжением V в векторное поле на J (π) .
Эти результаты лучше всего понятны в применении к конкретному примеру. Поэтому рассмотрим следующее.
Пример
Рассмотрим случай (E, π, M), где E ≅ R и M ≃ R . Тогда (J (π), π, E) определяет первое расслоение струй и может быть скоординировано с помощью (x, u, u 1), где

для всех p ∈ M и σ в Γ p (π). Контактная форма на J (π) имеет вид

Рассмотрим вектор V на E, имеющий форму

Тогда первое продолжение этого векторного поля на J (π) будет

Если мы теперь возьмем производную Ли контактной формы относительно это продолженное векторное поле,  мы получаем
мы получаем
![{\ displaystyle {\ begin {align} {\ mathcal {L}} _ {V ^ {1}} (\ theta) = {\ mathcal {L}} _ {V ^ {1}} (du-u_ {1} dx) \\ = {\ mathcal {L}} _ {V ^{1}} du- \ left ({\ mathcal {L}} _ {V ^ {1}} u_ {1} \ right) dx-u_ {1} \ left ({\ mathcal {L}} _ {V ^ {1}} dx \ right) \\ = d \ left (V ^ {1} u \ right) -V ^ {1} u_ {1} dx-u_ {1} d \ left (V ^ {1 } x \ right) \\ = dx- \ rho (x, u, u_ {1}) dx + u_ {1} du \\ = (1- \ rho (x, u, u_ {1})) dx + u_ {1} du \\ = [1- \ rho (x, u, u_ {1})] dx + u_ {1} (\ theta + u_ {1} dx) du = \ theta + u_ {1} dx \\ = [1 + u_ {1} u_ {1} - \ rho (x, u, u_ {1})] dx + u_ {1} \ theta \ end {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/73ccafd43ff5860a459d84a5765ab7982ff42a0f)
Hence, for preservation of the contact ideal, we require

And so the first prolongation of V to a vector field on J(π) is

Let us also calculate the second prolongation of V to a vector field on J(π). We have  as coordinates on J(π). Hence, the prolonged vector has the form
as coordinates on J(π). Hence, the prolonged vector has the form

The contact forms are

To preserve the contact ideal, we require

Now, θ has no u2dependency. Hence, from this equation we will pick вверх по формуле для ρ, которая обязательно будет тем же результатом, что мы нашли для V. Следовательно, задача аналогична продолжению векторного поля V до J (π). Другими словами, мы можем сгенерировать r-е продолжение векторного поля, рекурсивно применяя производную Ли контактных форм по отношению к продолженным векторным полям r раз. Итак, мы имеем

и поэтому

Следовательно, производная Ли второй контактной формы по V равна
![{\ displaystyle {\ begin {align} {\ mathcal {L}} _ {V ^ {2}} (\ theta _ {1}) = {\ mathcal {L}} _ {V ^ {2}} (du_ {1} -u_ {2} dx) \\ = {\ mathcal {L}} _ {V ^ {2}} du_ {1} - \ left ({\ mathcal {L}} _ {V ^ {2}} u_ {2} \ right) dx-u_ {2} \ left ({\ mathcal {L}} _ {V ^ {2}} dx \ right) \\ = d (V ^ {2} u_ {1}) - V ^ {2} u_ {2} dx-u_ {2} d (V ^ {2} x) \\ = d (1 + u_ {1} u_ {1}) - \ phi (x, u, u_ {1}, u_ {2}) dx + u_ {2} du \\ = 2u_ {1} du_ {1} - \ phi (x, u, u_ {1}, u_ {2}) dx + u_ {2} du \\ = 2u_ {1} du_ {1} - \ phi (x, u, u_ {1}, u_ {2}) dx + u_ {2} (\ theta + u_ {1} dx) du = \ theta + u_ {1} dx \\ = 2u_ {1} (\ theta _ {1} + u_ {2} dx) - \ phi (x, u, u_ {1}, u_ {2}) dx + u_ {2} (\ theta + u_ {1} dx) du_ {1} = \ theta _ {1} + u_ {2} dx \\ = [3u_ {1} u_ {2} - \ phi (x, u, u_ {1}, u_ {2})] dx + u_ {2} \ theta + 2u_ {1} \ theta _ {1 } \ end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/78252b9150284f554d25bad58168a88c161a3b05)
Следовательно, для  , чтобы сохранить контактный идеал, потребуем
, чтобы сохранить контактный идеал, потребуем

Итак, второе продолжение V до векторного поля на J (π) равно

Обратите внимание, первое продолжение V можно восстановить, опуская член второй производной в V или проецируя обратно на J (π).
Бесконечные пространства струй
обратный предел следовать проекций  дает начало бесконечное реактивное пространство J (π). Точка
дает начало бесконечное реактивное пространство J (π). Точка  - это класс эквивалентности секций π, которые имеют одинаковую k-струю в p как σ для всех значений k. Естественная проекция π ∞ отображает в p.
- это класс эквивалентности секций π, которые имеют одинаковую k-струю в p как σ для всех значений k. Естественная проекция π ∞ отображает в p.
Если просто мыслить в терминах координат, J (π) кажется бесконечномерным геометрическим объектом. Фактически, самый простой способ добиться дифференцируемой структуры на J (π), не опираясь на дифференцируемые карты, дает дифференциальное исчисление над коммутативными алгебрами. Двойственный к последовательным проекциям разнообразий - это последовательность вложений  коммутативных алгебр. Обозначим
коммутативных алгебр. Обозначим  просто как
просто как  . Теперь возьмем прямой предел
. Теперь возьмем прямой предел  . Это будет коммутативная алгебра, которую можно считать алгеброй гладких функций над геометрическим объектом J (π). Обратите внимание, что , имеет прямой предел, несет дополнительную структуру: это фильтрованная коммутативная алгебра.
. Это будет коммутативная алгебра, которую можно считать алгеброй гладких функций над геометрическим объектом J (π). Обратите внимание, что , имеет прямой предел, несет дополнительную структуру: это фильтрованная коммутативная алгебра.
Грубо говоря, конкретный элемент  всегда будет принадлежать some , поэтому это гладкая функция на конечном разнообразии J (π) в обычном понимании.
всегда будет принадлежать some , поэтому это гладкая функция на конечном разнообразии J (π) в обычном понимании.
Бесконечно продолженные УЧП
Для системы УЧП k-го порядка E ⊆ J (π) набор I (E) исчезающих на E гладких функций на J (π) является идеал в алгебре и, следовательно, в прямом пределе тоже.
Улучшите I (E), добавив все возможные композиции полных производных, примененные ко всем его элементам. Таким образом, мы получаем новый идеал I в , который теперь замкнут при операции взятия полной производной. Подмногообразие E (∞) в J (π), вырезанное I, называется бесконечным продолжением массива E.
Геометрически E (∞) - это многообразие формальных решений уравнения E. Точка of E (∞), как легко увидеть, представление сечением σ, график k-струи которого касается E в точке  с произвольно высоким порядком касания.
с произвольно высоким порядком касания.
Аналитически, если E задается с помощью φ = 0, формальное решение можно понимать как набор коэффициентов Тейлора сечения σ в точке p, которые обращают в нуль ряд Тейлора  в точке p.
в точке p.
Наиболее важно то, что свойства замыкания I подразумевают, что E (∞) касается контактной структуры бесконечного порядка  на J (π), так что, ограничивая до E (∞) получаем различие
на J (π), так что, ограничивая до E (∞) получаем различие  , и может использовать связанную последовательность Виноградова (C-спектральная).
, и может использовать связанную последовательность Виноградова (C-спектральная).
Замечание
В статье струи локальные сечения расслоения, но можно определить струи функций f: M → N, где M и N - многообразия; тогда струя f просто соответствует струе секции
- grf: M → M × N
- grf(p) = (p, f (p))
(gr f является известным как график функции f ) тривиального пучка (M × N, π 1, M). Однако это ограничение не упрощает теорию, поскольку глобальная тривиальность π не означает глобальной тривиальности π 1.
См. Также
Ссылки
Дополнительная литература
- Ehresmann, C., "Введение в теорию бесконечных симметричных структурных" и псевдогруппы Ли ". Geometrie Differentielle, коллок. Интер. du Centre Nat. de la Recherche Scientifique, Страсбург, 1953, 97–127.
- Коларж, И., Михор, П., Словак, Дж., Естественные операции в дифференциальной геометрии. Springer-Verlag: Berlin Heidelberg, 1993. ISBN 3-540-56235-4, ISBN 0-387-56235-4.
- Сондерс, ди-джей "Геометрия струйных связок", Cambridge University Press, 1989, ISBN 0-521-36948-7
- Красильщик, И.С., Виноградов, AM, [и др.], «Симметрии и законы для различных условий математической физики», Ам. Математика. Soc., Providence, RI, 1999, ISBN 0-8218 -0958-X.
- Олвер, П.Дж., «Эквивалентность, инварианты и симметрия», Cambridge University Press, 1995, ISBN 0-521-47811-1
- Джакетта, Г., Манджиаротти, Л., Сарданашвили, Г., «Продвинутая классика Теория поля», World Scientific, 2009, ISBN 978-981 -283-895-7
- Сарданашвили Г., Продвинутая дифференциальная геометрия для теоретиков. Пучки волокон, струйные многообразия и теория Лагранжа », Lambert Academic Publishing, 2013, ISBN 978-3-659-37815-7 ; arXiv : 0908.1886

