
Войти
 Навигатор отображает их положение в 9 утра, обозначенное треугольником, и, используя свой курс и скорость, оценивает свое собственное положение в 9:30 и 10:00.
Навигатор отображает их положение в 9 утра, обозначенное треугольником, и, используя свой курс и скорость, оценивает свое собственное положение в 9:30 и 10:00. В навигации, счисление мертвых - это процесс вычисления текущего положения некоторого движущегося объекта. с использованием ранее определенного местоположения или fix с использованием оценок скорости, направления и курса за прошедшее время. Соответствующий термин в биологии, используемый для описания процессов, с помощью которых животные обновляют свои оценки местоположения или направления, - это интеграция по траектории.
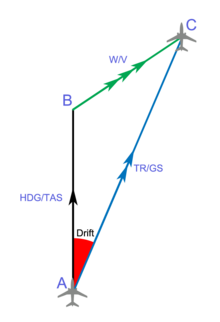 Дрейф - это угол между курсом самолета и желаемой траекторией. A - это последнее известное положение (фикс, обычно отображается кружком). B - воздушная позиция (обычно обозначается знаком плюс). C - позиция DR (обычно отображается треугольником).
Дрейф - это угол между курсом самолета и желаемой траекторией. A - это последнее известное положение (фикс, обычно отображается кружком). B - воздушная позиция (обычно обозначается знаком плюс). C - позиция DR (обычно отображается треугольником). Точный расчет подвержен совокупным ошибкам. Достижения навигационных средств, которые предоставляют точную информацию о местоположении, в частности, спутниковой навигации с использованием глобальной системы позиционирования, сделали простой подсчет людей устаревшим для большинства целей. Однако инерциальные навигационные системы, которые предоставляют очень точную информацию о направлении, используют метод точного счисления и очень широко применяются.
Термин «мертвый счет» изначально не использовался для сокращения «дедуктивного счета» и не является неправильным написанием термина «дед-счет». Неизвестно, что употребление словосочетания «дед» или «дедуктивный счет» появилось раньше 1931 года, то есть гораздо позже, чем «мертвый счет», появившийся уже в 1613 году в Оксфордском словаре английского языка. Однако первоначальное намерение слова «мертвый» в этом термине неясно. Неизвестно, используется ли оно для передачи «абсолютного», например, «прямо впереди», для исчисления с использованием других объектов, которые «мертвы в воде», или для правильного исчисления «ты мертв, если не считаешь правильным»..
По аналогии с их использованием в навигации, слова «мертвый счет» также используются для обозначения процесса оценки значения любой переменной величины с использованием более раннего значения и добавления любых изменений, произошедших за это время. Часто такое использование подразумевает, что изменения неизвестны точно. Более раннее значение и изменения могут быть измеренными или рассчитанными величинами.
Хотя точный расчет может дать наилучшую доступную информацию о текущем положении с небольшими математическими вычислениями или анализом, он подвержен значительным ошибкам аппроксимации. Для получения точной информации о местоположении необходимо всегда точно знать скорость и направление движения. В частности, точный расчет не учитывает дрейф направления во время движения в текучей среде. Эти ошибки, как правило, усугубляются на больших расстояниях, делая точный расчет сложным методом навигации для более длительных путешествий.
Например, если смещение измеряется количеством оборотов колеса, любое несоответствие между фактическим и предполагаемым пройденным расстоянием за один оборот, возможно, из-за проскальзывания или неровностей поверхности, будет источником ошибки. Поскольку каждая оценка положения относится к предыдущей, ошибки являются кумулятивными или складываются со временем.
Точность исчисления мертвых может быть значительно увеличена за счет использования других, более надежных методов, позволяющих получить новое исправление на полпути. Например, если кто-то перемещается по суше в условиях плохой видимости, то можно использовать точный расчет, чтобы приблизиться к известному положению ориентира, чтобы его можно было увидеть, прежде чем идти к самому ориентиру, что дает точно известную начальную точку - а затем снова отправился в путь.
Локализация статического сенсорного узла не является сложной задачей, потому что присоединения устройства GPS достаточно для определения местоположения. Но мобильный сенсорный узел , который постоянно меняет свое географическое положение со временем, трудно локализовать. В основном могут использоваться мобильные сенсорные узлы в некоторой конкретной области для сбора данных, то есть сенсорный узел, прикрепленный к животному на пастбищном поле или прикрепленный к солдату на поле боя. В этих сценариях невозможно предоставить устройство GPS для каждого узла датчика. Некоторые из причин этого включают стоимость, размер и разряд батареи ограниченных узлов датчиков. Для решения этой проблемы используется ограниченное количество опорных узлов (с GPS) в поле. Эти узлы непрерывно транслируют свои местоположения, а другие узлы, находящиеся поблизости, получают эти местоположения и вычисляют их местоположение, используя некоторые математические методы, такие как трилатерация. Для локализации необходимо как минимум три известных справочных местоположения. В литературе было предложено несколько алгоритмов локализации, основанных на методе последовательного Монте-Карло (SMC). Иногда узел в некоторых местах получает только два известных местоположения, и поэтому его невозможно локализовать. Чтобы преодолеть эту проблему, используется метод счисления. С помощью этого метода узел датчика использует свое предыдущее рассчитанное местоположение для локализации в более поздние интервалы времени. Например, в момент времени 1, если узел A вычисляет свое положение как loca_1 с помощью трех известных опорных местоположений; затем в момент времени 2 он использует loca_1 вместе с двумя другими опорными местоположениями, полученными от других двух опорных узлов. Это не только локализует узел за меньшее время, но также локализуется в положениях, где трудно получить три опорных точки.
В исследованиях навигации животных, мертвая расплата чаще (хотя и не исключительно) известна как интеграция путей. Животные используют его для оценки своего текущего местоположения на основе их перемещений из последнего известного местоположения. Было показано, что такие животные, как муравьи, грызуны и гуси, непрерывно отслеживают свое местоположение относительно начальной точки и возвращаются к ней, что является важным навыком для собирателей с фиксированным домом.
 Мертвые Счетные навигационные инструменты в прибрежном судоходстве
Мертвые Счетные навигационные инструменты в прибрежном судоходстве В морском судоходстве «мертвый» расчетный график обычно не принимает во внимание влияние течений или ветра. На борту корабля точный счет считается важным для оценки информации о местоположении и планирования движения судна.
Точный расчет начинается с известного местоположения, или фиксировать, которое затем математически увеличивается. или прямо на карте, с помощью записанного курса, скорости и времени. Скорость можно определить многими методами. До появления современных измерительных приборов он определялся на борту корабля с помощью журнала микросхем . Более современные методы включают в себя карьерный журнал, сравнивающий частоту вращения двигателя (например, в об / мин ) с таблицей полного водоизмещения (для кораблей) или ссылку на указанную воздушную скорость, подаваемую давлением от трубка Пито. Это измерение преобразуется в эквивалентную воздушную скорость на основе известных атмосферных условий и погрешностей измерения в системе индикации воздушной скорости. Военно-морское судно использует устройство, называемое шпагой (стержнеметр), которое использует два датчика на металлическом стержне для измерения электромагнитной дисперсии, вызванной движением корабля в воде. Затем это изменение преобразуется в скорость корабля. Расстояние определяется путем умножения скорости на время. Это начальное положение затем может быть скорректировано, в результате чего будет получено оценочное положение с учетом течения (известное как установка и дрейф в морской навигации). Если информация о местоположении недоступна, новый график точного счисления может начинаться с предполагаемого местоположения. В этом случае при последующих точках счисления будут учитываться расчетная установка и дрейф.
Точные позиции счисления вычисляются с заранее определенными интервалами и поддерживаются между исправлениями. Продолжительность интервала варьируется. Когда рассчитываются точные позиции, такие факторы, как установленная скорость, характер изменения курса и другие изменения курса, а также суждение штурмана определяют.
Перед разработкой в 18 веке морского хронометра Джоном Харрисоном и методом лунных расстояний основным методом определения определение долготы, доступное для таких моряков, как Христофор Колумб и Джон Кэбот в их трансатлантических рейсах. Такие инструменты, как доска хода , были разработаны, чтобы позволить даже неграмотным членам экипажа собирать данные, необходимые для точного расчета. Полинезийская навигация, однако, использует другие методы навигации.
 Британский магнитный компас P10 с навигационными приборами
Британский магнитный компас P10 с навигационными приборами 21 мая 1927 года Чарльз Линдберг приземлился в Париже, Франция после успешного беспосадочный перелет из США на одномоторном самолете Spirit of St. Louis. Поскольку самолет был оснащен очень простыми приборами, Линдберг использовал точный счет для навигации.
Мертвая расплата в воздухе похожа на мертвую расписку на море, но немного сложнее. Плотность воздуха, в котором движется самолет, влияет на его характеристики, а также от ветра, веса и настроек мощности.
Основная формула DR: Расстояние = Скорость x Время. Самолет, летевший со скоростью 250 узлов в течение 2 часов, пролетел по воздуху 500 морских миль. Треугольник ветра используется для расчета влияния ветра на курс и воздушную скорость с целью получения магнитного курса для поворота и скорости относительно земли (путевой скорости). Печатные таблицы, формулы или бортовой компьютер E6B используются для расчета влияния плотности воздуха на скорость набора высоты, скорость сжигания топлива и воздушную скорость.
Проведена линия курса. на аэронавигационной карте вместе с предполагаемым местоположением через фиксированные интервалы (скажем, каждые полчаса). Для получения исправлений используются визуальные наблюдения за объектами земли. Путем сравнения фиксированной и расчетной позиции вносятся поправки в курс и скорость самолета.
Мертвая расплата входит в учебную программу пилотов VFR (правил визуального полета - или базового уровня) во всем мире. Он преподается независимо от того, есть ли у самолета средства навигации, такие как GPS, ADF и VOR, и является ли он требованием ICAO. Многие летные учебные заведения запрещают студентам пользоваться электронными средствами до тех пор, пока они не овладеют точным расчетом.
Инерциальные навигационные системы (INSes), которые почти универсальны на более совершенных самолетах, внутренне используют мертвый счет. INS обеспечивает надежную навигацию практически в любых условиях, без необходимости использования внешних навигационных ссылок, хотя она по-прежнему подвержена небольшим ошибкам.
Мертвая расплата сегодня реализована в некоторых высококачественных автомобильных навигационных системах, чтобы преодолеть ограничения GPS / Только технология GNSS. Спутниковые микроволновые сигналы недоступны в гаражах и туннелях и часто сильно ухудшаются в городских каньонах и возле деревьев из-за заблокированных линий обзора спутников или многолучевого распространения. В системе навигации с точным счислением автомобиль оснащен датчиками, которые определяют длину окружности колеса и записывают их вращение и направление поворота. Эти датчики часто уже используются в автомобилях для других целей (антиблокировочная тормозная система, электронный контроль устойчивости ) и могут быть считаны навигационной системой из области контроллера . сеть шина. Затем навигационная система использует фильтр Калмана для интеграции всегда доступных данных датчиков с точной, но иногда недоступной информацией о местоположении из спутниковых данных в комбинированное определение местоположения.
Точный расчет используется в некоторых робототехнических приложениях. Обычно он используется для уменьшения потребности в сенсорных технологиях, таких как ультразвуковые датчики, GPS, или для размещения некоторых линейных и поворотных энкодеров в автономный робот, что значительно снижает стоимость и сложность за счет производительности и повторяемости. Правильное использование точного счисления в этом смысле будет заключаться в подаче известного процента электроэнергии или гидравлического давления на приводные двигатели робота в течение заданного промежутка времени от общей начальной точки. Подсчет не является полностью точным, что может привести к ошибкам в оценке расстояния в диапазоне от нескольких миллиметров (в CNC-обработка ) до километров (в БПЛА ), в зависимости от продолжительности время пробега, скорость робота, длина пробега и ряд других факторов.
С расширенным предложением датчиков в смартфонах встроенные акселерометры можно использовать в качестве шагомера и встроенного магнитометра в качестве поставщика направления компаса. Счетчик мертвых пешеходов (PDR ) может использоваться для дополнения других методов навигации аналогично автомобильной навигации или для расширения навигации в области, где другие навигационные системы недоступны.
В простой реализации пользователь держит телефон перед собой, и каждый шаг заставляет позицию перемещаться вперед на фиксированное расстояние в направлении, измеряемом компасом. Точность ограничена точностью датчика, магнитными возмущениями внутри конструкций и неизвестными переменными, такими как положение переноски и длина шага. Еще одна проблема - отличить ходьбу от бега и распознавать такие движения, как езда на велосипеде, подъем по лестнице или езда на лифте.
До того, как появились телефонные системы, существовало множество специализированных PDR-систем. В то время как шагомер можно использовать только для измерения линейного пройденного расстояния, системы PDR имеют встроенный магнитометр для измерения курса. Индивидуальные системы PDR могут принимать различные формы, включая специальные ботинки, ремни и часы, в которых изменчивость положения для переноски сведена к минимуму, чтобы лучше использовать направление магнитометра. Истинный мертвый счет довольно сложен, так как важно не только минимизировать базовый дрейф, но и учитывать различные сценарии переноски и перемещения, а также различия в оборудовании разных моделей телефонов.
Колесница, указывающая на юг, была древним китайским устройством, состоящим из двухколесной конной повозки, которая несла указатель, предназначенный всегда для направления на юг, независимо от того, как колесница поворачивается. Колесница появилась раньше, чем в навигации использовался магнитный компас , и она не могла определить направление на юг. Вместо этого он использовал своего рода точный счисление по направлению : в начале путешествия указатель был направлен на юг вручную с использованием местных знаний или астрономических наблюдений, например Полярной звезды. Затем во время движения механизм, возможно содержащий дифференциал шестерни, использовал разные скорости вращения двух колес, чтобы повернуть указатель относительно корпуса колесницы на угол поворота (с учетом доступной механической точности), удерживая указатель в исходном направлении на юг. Ошибки, как всегда в случае с мертвым счетом, накапливались по мере увеличения пройденного расстояния.
Сетевые игры и инструменты моделирования обычно используют точный расчет, чтобы предсказать, где актер должен быть прямо сейчас, используя его последнее известное кинематическое состояние (положение, скорость, ускорение, ориентация и угловая скорость). Это в первую очередь необходимо, потому что нецелесообразно отправлять обновления сети с частотой 60 Гц, с которой работает большинство игр. Базовое решение начинается с проецирования в будущее с использованием линейной физики:

Эта формула используется для перемещения объекта до получения нового обновления по сети. На этом этапе проблема состоит в том, что теперь есть два кинематических состояния: текущее расчетное положение и только что полученное фактическое положение. Правдоподобное решение этих двух состояний может быть довольно сложным. Один из подходов - создать кривую (например, кубические сплайны Безье, центростремительные сплайны Катмулла – Рома и кривые Эрмита ) между двумя состояниями, при этом проецируясь в будущее. Другой метод заключается в использовании смешивания проективной скорости, которое представляет собой смешивание двух проекций (последней известной и текущей), где текущая проекция использует смешение между последней известной и текущей скоростью в течение заданного времени.




В информатике мертв -счет относится к навигации по структуре данных массива с использованием индексов. Поскольку каждый элемент массива имеет одинаковый размер, можно напрямую обращаться к одному элементу массива, зная любую позицию в массиве.
Учитывая следующий массив:
| A | B | C | D | E |
зная адрес памяти там, где начинается массив, легко вычислить адрес памяти D:

Точно так же, зная адрес памяти D, легко вычислить адрес памяти B:

Это свойство особенно важно для производительность при использовании вместе с массивами структур Доступ к данным использования можно получить напрямую, без разыменования указателя .
| Искать Точный расчет в Викисловаре, бесплатный словарь. |