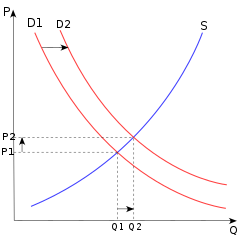
На этом графике сравнительная статика показывает увеличение спроса, вызывающее рост цены и количества. Сравнивая два состояния равновесия, сравнительная статика не описывает, как на самом деле происходит рост.
В экономике, сравнительная статика - это сравнение двух различных экономических результатов до и после изменения в некотором базовом экзогенном параметре.
В качестве типа статического анализа он сравнивает два различных состояния равновесия после процесса настройки (если есть). Он не изучает ни движение к равновесию, ни сам процесс изменения.
Сравнительная статика обычно используется для изучения изменений спроса и предложения при анализе одного рынка, а также для изучения изменений в денежном выражении или налоговая политика при анализе всей экономики. Сравнительная статика - это инструмент анализа в микроэкономике (включая анализ общего равновесия ) и макроэкономике. Сравнительная статика была формализована Джоном Р. Хиксом (1939) и Полом А. Самуэльсоном (1947) (Кехо, 1987, стр. 517), но была представлена графически, по крайней мере, с 1870-х годов..
Для моделей стабильных темпов изменения равновесия, таких как неоклассическая модель роста, сравнительная динамика является аналогом сравнительной статики (Eatwell, 1987).
Содержание
- 1 Линейное приближение
- 1.1 Многие уравнения и неизвестные
- 1.2 Стабильность
- 1.2.1 Пример роли предположения об устойчивости
- 2 Без ограничений
- 2.1 Применение максимизация прибыли
- 3 С ограничениями
- 4 Ограничения и расширения
- 5 См. также
- 6 Примечания
- 7 Ссылки
- 8 Внешние ссылки
Линейное приближение
Сравнительная статика результаты обычно получают с помощью теоремы о неявной функции для вычисления линейного приближения к системе уравнений, определяющей равновесие, в предположении, что равновесие является устойчивым. То есть, если мы рассмотрим достаточно малое изменение некоторого экзогенного параметра, мы можем рассчитать, как изменяется каждая эндогенная переменная, используя только первые производные членов, которые появляются в уравнениях равновесия.
Например, предположим, что равновесное значение некоторой эндогенной переменной  определяется следующим уравнением:
определяется следующим уравнением:

где  - экзогенный параметр. Затем, в приближении первого порядка, изменение , вызванное небольшим изменением , должно удовлетворять :
- экзогенный параметр. Затем, в приближении первого порядка, изменение , вызванное небольшим изменением , должно удовлетворять :

Здесь  и
и  представляют изменения в и соответственно, а
представляют изменения в и соответственно, а  и
и  - частные производные от
- частные производные от  по и (оценивается при начальных значениях и ) соответственно. Точно так же мы можем записать изменение в как:
по и (оценивается при начальных значениях и ) соответственно. Точно так же мы можем записать изменение в как:

Деление последнего уравнения на da дает сравнительную статическую производную x относительно a, также называемого множителем a на x:

Многие уравнения и неизвестные
Все приведенные выше уравнения остаются верными в случае системы  уравнений в неизвестных. Другими словами, предположим, что
уравнений в неизвестных. Другими словами, предположим, что  представляет систему уравнения, включающие вектор неизвестных и вектор
представляет систему уравнения, включающие вектор неизвестных и вектор  с заданными параметрами . Если мы сделаем достаточно небольшое изменение в параметрах, то результирующие изменения в эндогенных переменных могут быть произвольно хорошо аппроксимированы с помощью
с заданными параметрами . Если мы сделаем достаточно небольшое изменение в параметрах, то результирующие изменения в эндогенных переменных могут быть произвольно хорошо аппроксимированы с помощью  . В этом случае представляет собой ×матрицу частных производных функции по отношению к переменным и представляет собой ×матрицу частных производных функций в отношении параметров . (Производные в и оцениваются при начальных значениях и .) Обратите внимание, что если кто-то хочет только сравнительный статический эффект одной экзогенной переменной на одну эндогенную переменную, Правило Крамера можно использовать в полностью дифференцированной системе уравнений
. В этом случае представляет собой ×матрицу частных производных функции по отношению к переменным и представляет собой ×матрицу частных производных функций в отношении параметров . (Производные в и оцениваются при начальных значениях и .) Обратите внимание, что если кто-то хочет только сравнительный статический эффект одной экзогенной переменной на одну эндогенную переменную, Правило Крамера можно использовать в полностью дифференцированной системе уравнений  .
.
Стабильность
Предположение, что равновесие является стабильным, имеет значение по двум причинам. Во-первых, если равновесие было нестабильным, небольшое изменение параметра могло вызвать большой скачок значения , делая недействительным использование линейной аппроксимации. Более того, принцип соответствия Пола А. Самуэльсона утверждает, что стабильность равновесия имеет качественное значение для сравнительных статических эффектов. Другими словами, знание того, что равновесие устойчиво, может помочь нам предсказать, является ли каждый из коэффициентов в векторе  положительным или отрицательным.. В частности, одним из n необходимых и совместно достаточных условий стабильности является то, что определитель матрицы B размера n × n имеет определенный знак; поскольку этот определитель появляется как знаменатель в выражении для
положительным или отрицательным.. В частности, одним из n необходимых и совместно достаточных условий стабильности является то, что определитель матрицы B размера n × n имеет определенный знак; поскольку этот определитель появляется как знаменатель в выражении для  , знак определителя влияет на знаки всех элементов вектора
, знак определителя влияет на знаки всех элементов вектора  сравнительных статических эффектов.
сравнительных статических эффектов.
Пример роли предположения о стабильности
Предположим, что объемы спроса и предложения продукта определяются следующими уравнениями:


где  - это потребляемое количество,
- это потребляемое количество,  - это поставленное количество, P - цена, a и c - параметры пересечения, определяемые внешними влияниями на спрос и предложение соответственно, b < 0 is the reciprocal of the slope of the кривая спроса, а g - величина, обратная наклону кривой предложения; g>0, если кривая предложения наклонена вверх, g = 0, если кривая предложения вертикальная, и g < 0 if the supply curve is backward-bending. If we equate quantity supplied with quantity demanded to find the equilibrium price
- это поставленное количество, P - цена, a и c - параметры пересечения, определяемые внешними влияниями на спрос и предложение соответственно, b < 0 is the reciprocal of the slope of the кривая спроса, а g - величина, обратная наклону кривой предложения; g>0, если кривая предложения наклонена вверх, g = 0, если кривая предложения вертикальная, и g < 0 if the supply curve is backward-bending. If we equate quantity supplied with quantity demanded to find the equilibrium price  , мы находим, что
, мы находим, что

Это означает, что равновесная цена положительно зависит от точки пересечения спроса, если g - b>0, но отрицательно зависит от нее, если g - б < 0. Which of these possibilities is relevant? In fact, starting from an initial static equilibrium and then changing a, the new equilibrium is relevant only if the market actually goes to that new equilibrium. Suppose that price adjustments in the market occur according to

где  >0 - параметр скорости настройки, а
>0 - параметр скорости настройки, а  - это производная по времени цены, то есть обозначает, насколько быстро и в каком направлении цена изменяется. Согласно теории устойчивости, P будет сходиться к своему равновесному значению тогда и только тогда, когда производная
- это производная по времени цены, то есть обозначает, насколько быстро и в каком направлении цена изменяется. Согласно теории устойчивости, P будет сходиться к своему равновесному значению тогда и только тогда, когда производная  отрицательно. Эта производная определяется как
отрицательно. Эта производная определяется как

Это отрицательно тогда и только тогда, когда g - b>0, и в этом случае Параметр перехвата спроса положительно влияет на цену. Таким образом, мы можем сказать, что, хотя направление воздействия ограничения спроса на равновесную цену неоднозначно, когда все, что мы знаем, это то, что обратная величина наклона кривой предложения g отрицательна, в единственном значимом случае (в котором цена фактически переходит к своему новому равновесному значению) увеличение перехвата спроса увеличивает цену. Обратите внимание, что в этом случае, когда g - b>0, кривая предложения, если она имеет отрицательный наклон, круче кривой спроса.
Без ограничений
Предположим, что  - гладкая и строго вогнутая целевая функция, где x - вектор из n эндогенных переменных, а q - вектор из m экзогенных параметров. Рассмотрим задачу безусловной оптимизации
- гладкая и строго вогнутая целевая функция, где x - вектор из n эндогенных переменных, а q - вектор из m экзогенных параметров. Рассмотрим задачу безусловной оптимизации  . Пусть
. Пусть  , n на n матрица первых частных производных от по первым n аргументам x 1,..., x n. Максимизатор
, n на n матрица первых частных производных от по первым n аргументам x 1,..., x n. Максимизатор  определяется условием первого порядка n × 1
определяется условием первого порядка n × 1  .
.
Сравнительная статика спрашивает, как этот максимизатор изменяется в ответ на изменения в параметрах m. Цель состоит в том, чтобы найти  .
.
Строгая вогнутость целевая функция подразумевает, что якобиан функции f, которая является в точности матрицей вторых частных производных функции p по эндогенным переменным, неособен (имеет обратный). Согласно теореме о неявной функции, тогда можно рассматривать локально как непрерывно дифференцируемую функцию, а локальная реакция на небольшие изменения q определяется как
![D_ {q} x ^ {*} (q) = - [D_ {x} f (x ^ {*} (q); q)] ^ {{- 1}} D_ {q} f (x ^ {*} (q); q).](https://wikimedia.org/api/rest_v1/media/math/render/svg/e89de8f875adb74f0fc6993538f4a093db09d6f4)
Применяя цепное правило и условие первого порядка,

(См. Теорема о конверте ).
Приложение для максимизации прибыли
Предположим, фирма производит n товаров в количествах  . Прибыль фирмы является функцией p и m экзогенных параметров
. Прибыль фирмы является функцией p и m экзогенных параметров  , которые могут представлять, например, различные налоговые ставки. При условии, что функция прибыли удовлетворяет требованиям гладкости и вогнутости, метод сравнительной статики, приведенный выше, описывает изменения в прибыли фирмы из-за небольших изменений налоговых ставок.
, которые могут представлять, например, различные налоговые ставки. При условии, что функция прибыли удовлетворяет требованиям гладкости и вогнутости, метод сравнительной статики, приведенный выше, описывает изменения в прибыли фирмы из-за небольших изменений налоговых ставок.
С ограничениями
Обобщение вышеупомянутого метода позволяет проблеме оптимизации включать в себя набор ограничений. Это приводит к общей теореме о конверте. Приложения включают определение изменений маршаллианского спроса в ответ на изменения цены или заработной платы.
Ограничения и расширения
Одно из ограничений сравнительной статики с использованием теоремы о неявной функции состоит в том, что результаты действительны только в (потенциально очень малой) окрестности оптимума, то есть только для очень малых изменения экзогенных переменных. Еще одно ограничение - потенциально чрезмерно ограничительный характер допущений, обычно используемых для обоснования процедур сравнительной статики.
Пол Милгром и Крис Шеннон указали в 1994 году, что предположения, традиционно используемые для обоснования использования сравнительной статики в задачах оптимизации, на самом деле не нужны - в частности, предположения о выпуклости предпочтительных множеств или множеств ограничений, гладкости их границы, условия первой и второй производных, а также линейность бюджетных наборов или целевых функций. Фактически, иногда задача, удовлетворяющая этим условиям, может быть монотонно преобразована в задачу с идентичной сравнительной статикой, но с нарушением некоторых или всех этих условий; следовательно, эти условия не являются необходимыми для обоснования сравнительной статики. На основе статьи Милгрома и Шеннона, а также результатов, полученных Вейноттом и Топкисом, было разработано важное направление операционных исследований, названное монотонной сравнительной статикой. В частности, эта теория концентрируется на сравнительном статическом анализе с использованием только условий, которые не зависят от преобразований, сохраняющих порядок. Метод использует теорию решетки и вводит понятия квазисверхмодулярности и условия однократного пересечения. Широкое применение монотонной сравнительной статики в экономике включает теорию производства, теорию потребителей, теорию игр с полной и неполной информацией, теорию аукционов и другие.
См. Также
Примечания
Ссылки
- John Eatwell et al., Ed. (1987). «Сравнительная динамика», Нью-Пэлгрейв: Экономический словарь, т. 1, с. 517.
- Джон Р. Хикс (1939). Стоимость и капитал.
- Тимоти Дж. Кехо, 1987. «Сравнительная статика», Нью-Пэлгрейв: Экономический словарь, т. 1, стр. 517–20.
- Андреу Мас-Колелл, Майкл Д. Уинстон и Джерри Р. Грин, 1995. Микроэкономическая теория.
- Пол А. Самуэльсон (1947). Основы экономического анализа.
- Юджин Сильберберг и Винг Суен, 2000. Структура экономики: математический анализ, 3-е издание.
Внешние ссылки

 На этом графике сравнительная статика показывает увеличение спроса, вызывающее рост цены и количества. Сравнивая два состояния равновесия, сравнительная статика не описывает, как на самом деле происходит рост.
На этом графике сравнительная статика показывает увеличение спроса, вызывающее рост цены и количества. Сравнивая два состояния равновесия, сравнительная статика не описывает, как на самом деле происходит рост.