
Войти
 Canadarm (справа) во время миссии Space Shuttle STS-72 Canadarm (справа) во время миссии Space Shuttle STS-72 | |
| Оператор | NASA |
|---|---|
| Производитель | Spar Aerospace |
| Тип прибора | робот arm |
| Веб-сайт | www.asc-csa.gc.ca / eng / canadarm / default.asp |
| Свойства | |
| Масса |
|
| Размеры | 152 см × 38 см (60 дюймов × 15 дюймов) |
| Количество запущенных | 5 |
| Основной космический корабль | |
| Космический корабль | Спейс шаттл |
| Оператор | НАСА |
| Место запуска | Кеннеди LC-39 |
Canadarm или Canadarm1 (официально Система дистанционного манипулятора Shuttle или SRMS ) представляет собой серию роботизированных манипуляторов, которые использовались на орбитальных аппаратах Space Shuttle для развертывания, маневрирования и захвата полезной нагрузки. После катастрофы космического корабля "Колумбия", Canadarm всегда был соединен с системой датчиков стрелы орбитального корабля (OBSS), которая использовалась для проверки внешней части шаттла на предмет повреждений система тепловой защиты.
 Реплика Canadarm в натуральную величину в Еврокосмическом центре в Бельгии
Реплика Canadarm в натуральную величину в Еврокосмическом центре в Бельгии В 1969 году Канада была приглашена Национальное управление по аэронавтике и исследованию космического пространства (НАСА) для участия в программе Space Shuttle. В то время, что повлечет за собой это участие, еще не было решено, но система манипуляторов была определена как важный компонент. Канадская компания ATCON разработала робота для загрузки топлива в ядерные реакторы CANDU ; этот робот привлек внимание НАСА. В 1975 году НАСА и Канадский национальный исследовательский совет (NRC) подписали меморандум о взаимопонимании, согласно которому Канада разработает и построит Canadarm.
NRC заключила контракт на манипуляцию с Spar Aerospace.. В рамках этого контракта на проектирование, разработку, испытания и оценку были сконструированы три системы: инженерная модель для помощи в проектировании и испытании Canadarm, квалификационная модель, которая была подвергнута экологическим испытаниям для проверки конструкции для использования в космосе, и полетная модель. Блок.
Церемония приемки для НАСА прошла в RMS Division Spar. в Торонто 11 февраля 1981 года. Здесь Ларкин Кервин, тогдашний глава NRC, дал SRMS неофициальное название, Canadarm.
Первый Canadarm был доставлен НАСА в апреле 1981 года. Астронавт Джудит Резник разработала программное обеспечение НАСА и бортовые рабочие процедуры для системы. Всего было построено и доставлено в НАСА пять вооружений - №№ 201, 202, 301, 302 и 303. Рука 302 была потеряна в результате аварии Челленджера.
 История Масгрейв, закрепленная на конце Canadarm, готовится к подъему на вершину телескопа во время STS -61.
История Масгрейв, закрепленная на конце Canadarm, готовится к подъему на вершину телескопа во время STS -61.Исходный Canadarm был способен размещать полезные нагрузки весом до 65 000 фунтов (29 000 кг) в космосе. В середине 1990-х система управления стрелой была модернизирована, чтобы увеличить грузоподъемность до 586 000 фунтов (266 000 кг) для поддержки операций по сборке космической станции. Хотя двигатели могут маневрировать полезными грузами с массой загруженного автобуса в космосе, двигатели стрелы не могут поднимать собственный вес руки, когда она находится на земле. Поэтому НАСА разработало модель руки для использования в учебном центре в Космическом центре Джонсона, расположенном в Хьюстоне, Техас. Canadarm также может извлекать, ремонтировать и развертывать спутники, предоставлять передвижную выдвижную лестницу для внекорабельной деятельности членов экипажа для рабочих станций или фиксаторов для ног, а также использовать его в качестве вспомогательного средства для инспекции, позволяющего членам летного экипажа просматривать поверхности орбитального корабля или полезной нагрузки через телекамеру на Canadarm.
Базовая конфигурация Canadarm состоит из манипулятора, дисплея и панели управления Canadarm, включая ручные контроллеры вращения и поступательного движения на станции летного экипажа в кормовой части орбитального аппарата, а также блок интерфейса контроллера манипулятора, который взаимодействует с орбитальным аппаратом. компьютер. Один член экипажа управляет Canadarm с поста управления в кормовой части кабины экипажа, а второй член экипажа обычно помогает с операциями телекамеры. Это позволяет оператору Canadarm наблюдать за операциями Canadarm через полезную нагрузку в кормовой кабине летного экипажа и через окна над головой, а также через телевизионные мониторы с замкнутым контуром на кормовой станции кабины пилота.
Canadarm оснащен взрывчатым механизмом, позволяющим сбрасывать руку. Эта система безопасности позволила бы закрыть двери отсека для полезной нагрузки Орбитера в случае, если рука вышла из строя в выдвинутом положении и не могла быть убрана.
Canadarm имеет длину 15,2 метра (50 футов) и Диаметр 38 см (15 дюймов) с шестью степенями свободы. Он весит 410 кг (900 фунтов) отдельно и 450 кг (990 фунтов) как часть всей системы. Canadarm имеет шесть суставов, которые примерно соответствуют суставам руки человека, с плечевыми суставами рыскания и наклона, локтевым суставом, а также суставами наклона, рыскания и крена запястья. Концевой эффектор - это блок на конце запястья, который захватывает зажимное приспособление полезной нагрузки. Два легких сегмента стрелы называются верхним и нижним рычагами. Верхняя стрела соединяет плечевые и локтевые суставы, а нижняя стрела соединяет локтевые и лучезапястные суставы.
 Астронавт на конце руки, 1993
Астронавт на конце руки, 1993 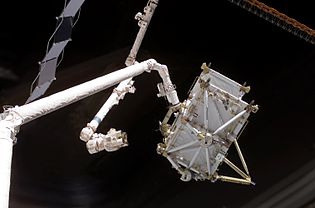 Canadarm2 движется к P5 секция фермы, находящаяся в распоряжении Discovery's Canadarm, при подготовке к передаче во время STS-116.
Canadarm2 движется к P5 секция фермы, находящаяся в распоряжении Discovery's Canadarm, при подготовке к передаче во время STS-116.Имитация Canadarm, установленная на космическом шаттле Enterprise, была замечена, когда Двери отсека полезной нагрузки прототипа орбитального корабля были открыты для тестирования ангаров в начале программы Space Shuttle. Впервые Canadarm был испытан на орбите в 1981 году во время миссии Space Shuttle Columbia STS-2. Его первое оперативное использование было на STS-3 для развертывания и маневрирования пакета диагностики плазмы. С тех пор Canadarm выполнила более 90 миссий со всеми пятью орбитальными аппаратами.
С момента установки Canadarm2 на Международной космической станции (МКС), два рычага использовались для передачи сегментов станции для сборки из Orbiter Canadarm в Canadarm2; Использование обоих элементов в тандеме заслужило в СМИ прозвище «Канадское рукопожатие».
90-я и последняя миссия шаттла Canadarm состоялась в июле 2011 года на STS-135, доставив Raffaello MPLM на МКС и обратно. Он выставлен вместе с «Атлантидой» в Комплекс для посетителей Космического центра Кеннеди. Канадарм Дискавери выставлен рядом с ним в Центре Удвар-Хейзи Национального музея авиации и космонавтики. Endeavour оставил свой OBSS на Международной космической станции в рамках своей последней миссии, в то время как его Canadarm первоначально планировалось разместить в штаб-квартире Канадского космического агентства (CSA). Однако Canadarm Endeavour сейчас находится в постоянной экспозиции Канадского музея авиации и космонавтики в Оттаве. Последний из Canadarms, который летал в космос, SRMS, установленный на борту Atlantis на STS-135 в июле 2011 года, был отправлен в Космический центр имени Джонсона НАСА в Хьюстоне для инженерных исследований и возможного повторного использования в будущей миссии.
На основе Canadarm1, более крупный Canadarm2 используется для швартовки ферм, коммерческих транспортных средств и для проверки всей Международной космической станции.
Этот меньший Canadarm3 будет использоваться для швартовки модулей и проверки Лунного шлюза.
| На Викискладе есть средства массовой информации, связанные с Canadarm. |