
Войти
 Двигатель от 3,5-дюймового дисковода гибких дисков. Катушки, расположенные радиально, изготовлены из медной проволоки с голубой изоляцией. Ротор (вверху справа) был снят и перевернут. Серое кольцо внутри чашки - это постоянный магнит. Этот конкретный двигатель является инерционным, со статором внутри ротора.
Двигатель от 3,5-дюймового дисковода гибких дисков. Катушки, расположенные радиально, изготовлены из медной проволоки с голубой изоляцией. Ротор (вверху справа) был снят и перевернут. Серое кольцо внутри чашки - это постоянный магнит. Этот конкретный двигатель является инерционным, со статором внутри ротора. 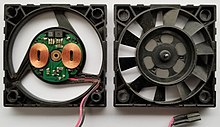 Бесщеточный двигатель постоянного тока канальный вентилятор. Две катушки на печатной плате взаимодействуют с шестью круглыми постоянными магнитами в блоке вентилятора.
Бесщеточный двигатель постоянного тока канальный вентилятор. Две катушки на печатной плате взаимодействуют с шестью круглыми постоянными магнитами в блоке вентилятора. A бесщеточный электродвигатель постоянного тока (двигатель BLDC или двигатель BL ), а также известные как двигатель с электронной коммутацией (ECM или двигатель EC ) и синхронные двигатели постоянного тока, питаются синхронными двигателями постоянным током (DC) электричеством через инвертор или импульсный источник питания, который вырабатывает электричество в виде переменного тока (переменный ток) для управления каждой фазой двигателя через контроллер с обратной связью . Контроллер подает импульсы тока на двигатель обмотки, которые управляют скоростью и крутящим моментом двигателя. Эта система управления заменяет коммутатор (щетки), используемый во многих обычных электродвигателях.
Конструкция системы бесщеточного двигателя обычно аналогична синхронному двигателю с постоянными магнитами (PMSM), но также может быть переключаемым реактивным двигателем или индукционный (асинхронный) двигатель. Они также могут использовать неодимовые магниты и быть бегунами (статор окружен ротором), бегунами (ротор окружен статором) или осевыми (ротор и статор плоские и параллельные).
Преимущества бесщеточного двигателя перед щеточными двигателями - высокое соотношение мощности к весу, высокая скорость, электронное управление и низкие эксплуатационные расходы.. Бесщеточные двигатели находят применение в таких местах, как компьютерная периферия (дисководы, принтеры), ручные электроинструменты и транспортные средства, от моделей самолетов до автомобилей. В современных стиральных машинах бесщеточные двигатели постоянного тока позволили заменить резиновые ремни и редукторы гораздо более простой и надежной конструкцией с прямым приводом.
Матовые двигатели постоянного тока были изобретены в 19 веке и до сих пор широко распространены. Бесщеточные двигатели постоянного тока стали возможными благодаря развитию твердотельной электроники в 1960-х.
Электродвигатель развивает крутящий момент за счет сохранения магнитных полей ротор, вращающаяся часть машины, и статор, неподвижная часть машины, смещены. Один или оба набора магнитов представляют собой электромагниты, состоящие из катушки проволоки, намотанной на железный сердечник. Постоянный ток, проходящий через обмотку провода, создает магнитное поле, обеспечивающее питание двигателя. Несоосность создает крутящий момент, который пытается перестроить поля. По мере того как ротор движется, и поля приходят в соответствие, необходимо перемещать поле ротора или статора, чтобы поддерживать несоосность и продолжать генерировать крутящий момент и движение. Устройство, которое перемещает поля в зависимости от положения ротора, называется коммутатором.
В щеточных двигателях это осуществляется поворотным переключателем на Вал двигателя называется коммутатором. Он состоит из вращающегося цилиндра, разделенного на несколько металлических контактных сегментов на роторе. Сегменты подключены к обмоткам проводов на роторе. Два или более неподвижных контакта, называемых щетками, сделанными из мягкого проводника, такого как графит, прижимаются к коммутатору, создавая скользящий электрический контакт с последовательными сегментами при вращении ротора. Щетки избирательно подают электрический ток на обмотки. Когда ротор вращается, коммутатор выбирает разные обмотки, и направленный ток прикладывается к данной обмотке, так что магнитное поле ротора остается смещенным со статором и создает крутящий момент в одном направлении.
Коммутатор имеет множество технических недостатков, которые привели к сокращению использования щеточных двигателей. Эти недостатки:
В течение последних ста лет мощные щеточные двигатели постоянного тока, когда-то являвшиеся основой отрасли, были заменены на переменный ток (AC) синхронные двигатели. Сегодня щеточные двигатели используются только в приложениях с низким энергопотреблением или там, где доступен только постоянный ток, но вышеупомянутые недостатки ограничивают их использование даже в этих приложениях. Для решения этих проблем были изобретены бесщеточные двигатели.
Развитие полупроводниковой электроники в 1970-х годах позволило исключить коммутатор в двигателях постоянного тока, а также щетки в двигателях с постоянными магнитами. В бесщеточных двигателях постоянного тока электронная сервосистема заменяет механические контакты коммутатора. Электронный датчик определяет угол поворота ротора и управляет полупроводниковыми переключателями, такими как транзисторы, которые переключают ток через обмотки, либо меняя направление тока на обратное, либо в некоторых двигателях отключающих его., в нужное время при каждом повороте вала на 180 °, чтобы электромагниты создавали крутящий момент в одном направлении. Устранение скользящего контакта позволяет бесщеточным двигателям иметь меньшее трение и более длительный срок службы; их срок службы ограничен только сроком службы их подшипников.
щеточных двигателей постоянного тока, которые развивают максимальный крутящий момент в неподвижном состоянии, линейно уменьшающийся с увеличением скорости. Некоторые ограничения щеточных двигателей можно преодолеть с помощью бесщеточных двигателей; они включают более высокую эффективность и меньшую подверженность механическому износу. Эти преимущества достигаются за счет потенциально менее прочной, более сложной и более дорогой управляющей электроники.
Типичный бесщеточный двигатель имеет постоянные магниты, которые вращаются вокруг фиксированного якоря, что устраняет проблемы, связанные с подводом тока к движущемуся якорю. Электронный контроллер заменяет узел щеток / коммутатора щеточного двигателя постоянного тока, который постоянно переключает фазу на обмотки, чтобы двигатель продолжал вращаться. Контроллер выполняет аналогичное синхронизированное распределение мощности, используя твердотельную схему, а не систему щеток / коммутаторов.
Бесщеточные двигатели имеют несколько преимуществ по сравнению с щеточными двигателями постоянного тока, включая высокое отношение крутящего момента к массе, больший крутящий момент на ватт (повышенная эффективность), повышенная надежность, пониженный уровень шума, более длительный срок службы (не щетка и эрозия коллектора), устранение ионизирующих искр от коллектора и общее снижение электромагнитных помех (EMI). При отсутствии обмоток на роторе они не подвергаются воздействию центробежных сил, а поскольку обмотки поддерживаются корпусом, они могут охлаждаться за счет теплопроводности, не требуя для охлаждения воздушного потока внутри двигателя. Это, в свою очередь, означает, что внутренние части двигателя могут быть полностью закрыты и защищены от грязи или других посторонних предметов.
Бесщеточная коммутация двигателя может быть реализована программно с использованием компьютера микроконтроллер или микропроцессор, или, альтернативно, может быть реализована с использованием аналоговых или цифровых схем. Коммутация с помощью электроники вместо щеток обеспечивает большую гибкость и возможности, недоступные для щеточных двигателей постоянного тока, включая ограничение скорости, «микрошаговый» режим для управления медленным и точным движением и удерживающий момент в неподвижном состоянии. Программное обеспечение контроллера можно настроить для конкретного двигателя, используемого в приложении, что повысит эффективность коммутации.
Максимальная мощность, которую можно приложить к бесщеточному двигателю, почти полностью ограничена нагревом; слишком сильный нагрев ослабляет магниты и может повредить изоляцию обмоток.
При преобразовании электричества в механическую энергию бесщеточные двигатели более эффективны, чем щеточные. Это улучшение в значительной степени связано с частотой переключения электричества, определяемой обратной связью датчика положения. Дополнительный выигрыш связан с отсутствием щеток, что снижает потери механической энергии из-за трения. Повышенный КПД является максимальным в области холостого хода и низкой нагрузки характеристики двигателя. При высоких механических нагрузках бесщеточные двигатели и высококачественные щеточные двигатели сравнимы по эффективности.
Условия и требования, в которых производители используют бесщеточные двигатели постоянного тока, включают работу без обслуживания, высокие скорости и работу, при которой возникает искрение. опасные (например, взрывоопасные среды) или могут повлиять на электронно-чувствительное оборудование.
Конструкция бесщеточного двигателя напоминает шаговый двигатель, но двигатели имеют важные отличия из-за различий в реализации и работе. В то время как шаговый двигатель часто останавливается, когда ротор находится в определенном угловом положении, бесщеточный двигатель обычно предназначен для непрерывного вращения. Оба типа двигателей могут иметь, но обычно не включают в себя датчик положения ротора для внутренней обратной связи. В качестве шагового двигателя хорошо спроектированный бесщеточный двигатель может поддерживать конечный крутящий момент при нулевых оборотах.
Поскольку контроллер реализует функции традиционных щеток, ему требуется ориентация / положение ротора (относительно катушек статора ). Это происходит автоматически в щеточном двигателе из-за фиксированной геометрии вала ротора и щеток. В некоторых конструкциях используются датчики Холла или энкодер для непосредственного измерения положения ротора. Другие измеряют противо-ЭДС в неприводных катушках для определения положения ротора, устраняя необходимость в отдельных датчиках на эффекте Холла, и поэтому их часто называют бессенсорными контроллерами.
Типичный контроллер содержит три двунаправленных выхода (т. Е. Трехфазный выход с частотным регулированием), которые управляются логической схемой. Простые контроллеры используют компараторы, чтобы определить, когда следует увеличить выходную фазу, в то время как более продвинутые контроллеры используют микроконтроллер для управления ускорением, скоростью управления и точной настройки эффективности.
Контроллеры, которые определяют положение ротора на основе противо-ЭДС, имеют дополнительные проблемы при инициировании движения, поскольку противо-ЭДС не возникает, когда ротор неподвижен. Обычно это достигается путем начала вращения с произвольной фазы, а затем перехода к правильной фазе, если обнаруживается, что это неверно. Это может вызвать кратковременное вращение двигателя в обратном направлении, что еще больше усложнит последовательность запуска. Другие бессенсорные контроллеры способны измерять насыщение обмотки, вызванное положением магнитов, для определения положения ротора.
Двумя ключевыми характеристиками бесщеточных двигателей постоянного тока являются постоянные двигателя 


 Схема для стилей намотки треугольником и звездой. (На этом изображении не показаны индуктивные и генераторные свойства двигателя)
Схема для стилей намотки треугольником и звездой. (На этом изображении не показаны индуктивные и генераторные свойства двигателя) Бесщеточные двигатели могут быть сконструированы в нескольких различных физических конфигурациях: в «традиционной» (также известной как входной канал ) конфигурации постоянный магниты являются частью ротора. Ротор окружен тремя обмотками статора. В конфигурации outrunner (или с внешним ротором) радиальное соотношение между катушками и магнитами обратное; Катушки статора образуют центр (сердечник) двигателя, в то время как постоянные магниты вращаются внутри выступающего ротора, который окружает сердечник. Плоский или осевой тип потока, используемый там, где есть ограничения по пространству или форме, использует пластины статора и ротора, установленные лицом к лицу. У аутраннеров обычно больше полюсов, они объединены в три группы для поддержания трех групп обмоток и имеют более высокий крутящий момент на низких оборотах. Во всех бесщеточных двигателях катушки неподвижны.
Есть две распространенные конфигурации электрических обмоток; конфигурация треугольника соединяет три обмотки друг с другом (последовательные цепи ) в треугольную схему, и питание подается на каждое из соединений. Соединение "звезда" (Y-образная), иногда называемое звездообразной обмоткой, соединяет все обмотки с центральной точкой (параллельные цепи ), и питание подается на оставшийся конец каждой обмотки.
Двигатель с обмотками, соединенными треугольником, дает низкий крутящий момент на низкой скорости, но может дать более высокую максимальную скорость. Конфигурация звезды дает высокий крутящий момент на низкой скорости, но не такой высокой максимальной скорости.
Хотя на КПД сильно влияет конструкция двигателя, звездообразная обмотка обычно более эффективна. В обмотках, соединенных треугольником, половина напряжения прикладывается к обмоткам, прилегающим к ведомому выводу (по сравнению с обмоткой непосредственно между ведомыми выводами), увеличивая резистивные потери. Кроме того, обмотки могут позволить паразитным электрическим токам высокой частоты полностью циркулировать внутри двигателя. Обмотка, соединенная звездой, не содержит замкнутого контура, в котором могут протекать паразитные токи, предотвращая такие потери.
С точки зрения контроллера, два стиля обмоток обрабатываются совершенно одинаково.
 Четыре полюса статора двухфазного бесщеточного двигателя. Это часть охлаждающего вентилятора компьютера; ротор был удален.
Четыре полюса статора двухфазного бесщеточного двигателя. Это часть охлаждающего вентилятора компьютера; ротор был удален. Бесщеточные двигатели выполняют многие функции, которые изначально выполнялись щеточными двигателями постоянного тока, но стоимость и сложность управления не позволяют бесщеточным двигателям полностью заменять щеточные двигатели в самых дешевых областях. Тем не менее, бесщеточные двигатели стали доминировать во многих приложениях, особенно в таких устройствах, как компьютер жесткие диски и CD / DVD-плееры. Маленькие охлаждающие вентиляторы в электронном оборудовании работают исключительно от бесщеточных двигателей. Их можно найти в беспроводных электроинструментах, где повышенная эффективность двигателя приводит к более длительным периодам использования до того, как потребуется зарядить аккумулятор. Бесщеточные двигатели с низкой скоростью и малой мощностью используются в вертушках с прямым приводом для граммофонных пластинок.
Бесщеточные двигатели используются в электромобилях, гибридные автомобили и личные автовозы. В большинстве электрических велосипедов используются бесщеточные двигатели, которые иногда встроены в саму ступицу колеса, при этом статор прочно прикреплен к оси, а магниты прикреплены к колесу и вращаются вместе с ним. Тот же принцип применяется в самобалансирующихся колесах самоката. В большинстве моделей RC с электрическим приводом используются бесщеточные двигатели из-за их высокой эффективности.
Бесщеточные двигатели используются во многих современных аккумуляторных инструментах, включая некоторые триммеры, воздуходувки, пилы (циркулярные или возвратно-поступательное движение ), а сверлит / драйверы. Преимущества бесщеточных двигателей по сравнению с щеточными (малый вес, высокая эффективность) более важны для ручных инструментов с батарейным питанием, чем для больших стационарных инструментов, подключенных к розетке переменного тока, поэтому в этом сегменте рынка они стали популярнее.
В отраслях отопления, вентиляции и кондиционирования воздуха (HVAC) и охлаждения наблюдается тенденция к использованию бесщеточных двигателей. вместо различных типов двигателей переменного тока. Наиболее важной причиной перехода на бесщеточный двигатель является резкое снижение мощности, необходимой для их работы, по сравнению с обычным двигателем переменного тока. В то время как двигатели с расщепленными полюсами и с постоянными разделенными конденсаторами когда-то доминировали в качестве двигателей вентиляторов, сейчас многие вентиляторы работают с бесщеточными двигателями. В некоторых вентиляторах также используются бесщеточные двигатели для повышения общей эффективности системы.
В дополнение к более высокому КПД бесщеточного двигателя, в системах отопления, вентиляции и кондиционирования воздуха (особенно в системах с регулируемой скоростью и / или модуляцией нагрузки) используются бесщеточные двигатели, поскольку встроенный микропроцессор обеспечивает возможность программирования, управления воздушным потоком и последовательной связи.. Некоторые потолочные и переносные вентиляторы также оснащены этим двигателем. Они рекламируют мотор, который очень энергоэффективен и тише большинства вентиляторов.
Применение бесщеточных двигателей постоянного тока в промышленном проектировании в первую очередь сосредоточено на производстве или промышленной автоматизации проектировании. В производстве бесщеточные двигатели в основном используются для систем управления движением, позиционирования или срабатывания.
Бесщеточные двигатели идеально подходят для производственных применений из-за их высокой удельной мощности, хороших характеристик крутящего момента, высокой эффективности, широкого диапазона скоростей и низких затрат на обслуживание. Чаще всего бесщеточные двигатели постоянного тока используются в промышленности: линейные двигатели, серводвигатели, приводы для промышленных роботов, приводные двигатели экструдеров и приводы подачи для станков с ЧПУ.
Бесщеточные двигатели обычно используются в качестве приводов насосов, вентиляторов и шпинделей в системах с регулируемой или регулируемой скоростью, поскольку они способны развивать высокий крутящий момент с хорошей реакцией на скорость. Кроме того, их можно легко автоматизировать для дистанционного управления. Благодаря своей конструкции они обладают хорошими тепловыми характеристиками и высокой энергоэффективностью. Для получения регулируемой скорости бесщеточные двигатели работают в электромеханической системе, которая включает в себя электронный контроллер двигателя и датчик обратной связи по положению ротора.
Бесщеточные двигатели постоянного тока широко используются в качестве серводвигателей для станков. сервоприводы. Серводвигатели используются для механического перемещения, позиционирования или точного управления движением. Шаговые двигатели постоянного тока также могут использоваться как серводвигатели; однако, поскольку они работают с управлением без обратной связи, они обычно демонстрируют пульсации крутящего момента. Бесщеточные двигатели постоянного тока более подходят в качестве серводвигателей, поскольку их точное движение основано на замкнутой системе управления, которая обеспечивает строго контролируемую и стабильную работу.
Бесщеточные двигатели используются в промышленных установках для позиционирования и приведения в действие. Для сборочных роботов бесщеточные шаговые или сервомоторы используются для позиционирования детали для сборки или инструмента для производственного процесса, такого как сварка или покраска. Бесщеточные двигатели также могут использоваться для привода линейных приводов.
Двигатели, которые непосредственно создают линейное движение, называются линейными двигателями. Преимущество линейных двигателей заключается в том, что они могут производить линейное движение без необходимости использования системы передачи , такой как ШВП, ходовой винт, реечный механизм и -шестерня, кулачок, шестерни или ремни, которые потребуются для вращающихся двигателей. Системы передачи, как известно, вызывают меньшую отзывчивость и меньшую точность. Бесщеточные линейные двигатели постоянного тока с прямым приводом состоят из статора с прорезями и магнитными зубьями и подвижного привода с постоянными магнитами и обмотками катушки. Чтобы получить линейное движение, контроллер двигателя возбуждает обмотки катушки в исполнительном механизме, вызывая взаимодействие магнитных полей, приводящее к линейному движению. Трубчатые линейные двигатели являются другой формой конструкции линейного двигателя, работающей аналогичным образом.
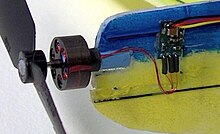 Управляемый микропроцессором двигатель BLDC, приводящий в движение микроуправляемый радиоуправляемый самолет. Этот двигатель с внешним ротором весит 5 г и потребляет примерно 11 Вт.
Управляемый микропроцессором двигатель BLDC, приводящий в движение микроуправляемый радиоуправляемый самолет. Этот двигатель с внешним ротором весит 5 г и потребляет примерно 11 Вт. Бесщеточные двигатели стали популярным выбором для моделей самолетов, включая вертолеты и <98.>дроны. Их благоприятное отношение мощности к весу и широкий диапазон доступных размеров, от менее 5 граммов до больших двигателей, рассчитанных на выходную мощность киловатт, произвели революцию на рынке электрических двигателей. летающая модель с приводом от двигателя, вытесняющая практически все щеточные электродвигатели, за исключением недорогих, часто игрушечных самолетов. Они также стимулировали рост простых, легких электрических моделей самолетов вместо прежних двигателей внутреннего сгорания, устанавливаемых на более крупные и тяжелые модели. Повышенное соотношение мощности к весу современных батарей и бесщеточных двигателей позволяет моделям подниматься вертикально, а не постепенно. Низкий уровень шума и небольшая масса по сравнению с небольшими двигателями внутреннего сгорания тлеющего топлива - еще одна причина их популярности.
Законодательные ограничения на использование моделей самолетов с двигателями внутреннего сгорания в некоторых странах, чаще всего из-за возможного шумового загрязнения - даже со специально разработанными глушителями почти для все модели двигателей, доступные в последние десятилетия, также способствовали переходу на мощные электрические системы.
Их популярность также возросла в области радиоуправляемых (RC) автомобилей. Бесщеточные двигатели были разрешены в гонках на радиоуправляемых автомобилях в Северной Америке в соответствии с Radio Operated Auto Racing (ROAR) с 2006 года. Эти двигатели обеспечивают большую мощность для гонщиков RC и, если они соединены с соответствующей передачей и высокой -разрядившие литий-полимерные (Li-Po) или литий-фосфатные (LiFePO4) аккумуляторы, эти автомобили могут развивать скорость более 160 километров в час (99 миль в час).
Бесщеточные двигатели способны создавать больший крутящий момент и иметь более высокую пиковую скорость вращения по сравнению с двигателями, работающими на нитро- или бензине. Нитро-двигатели достигают максимальной скорости около 46 800 об / мин и 2,2 киловатта (3,0 л.с.), тогда как бесщеточный двигатель меньшего размера может развивать скорость 50 000 об / мин и 3,7 киловатт (5,0 л.с.). Более крупные бесколлекторные двигатели RC могут развивать мощность до 10 киловатт (13 л.с.) и 28 000 об / мин для моделей в масштабе одной пятой.
| Wikimedia Commons содержит материалы, относящиеся к Бесщеточные электродвигатели постоянного тока. |