
Войти
A щеточный электродвигатель постоянного тока - это электродвигатель с внутренним управлением предназначен для работы от источника постоянного тока . Щеточные двигатели были первым коммерчески важным применением электроэнергии для привода механической энергии, а системы распределения постоянного тока использовались более 100 лет для управления двигателями в коммерческих и промышленных зданиях. Щеточные двигатели постоянного тока можно изменять по скорости, изменяя рабочее напряжение или силу магнитного поля. В зависимости от подключения поля к источнику питания, характеристики скорости и крутящего момента щеточного двигателя могут быть изменены для обеспечения постоянной скорости или скорости, обратно пропорциональной механической нагрузке. Электродвигатели с щетками продолжают использоваться для электрических движителей, кранов, бумагоделательных машин и сталепрокатных станов. Поскольку щетки изнашиваются и требуют замены, бесщеточные двигатели постоянного тока, использующие силовые электронные устройства, вытеснили щеточные двигатели из многих приложений.
Следующий рисунок иллюстрируют простой двухполюсный матовый, Двигатель постоянного тока.
Вращение двигателя постоянного тока Простой электродвигатель постоянного тока. Когда катушка запитана, вокруг якоря создается магнитное поле . Левая сторона якоря отталкивается от левого магнита и тянется вправо, вызывая вращение.
Простой электродвигатель постоянного тока. Когда катушка запитана, вокруг якоря создается магнитное поле . Левая сторона якоря отталкивается от левого магнита и тянется вправо, вызывая вращение.  Якорь продолжает вращаться.
Якорь продолжает вращаться. 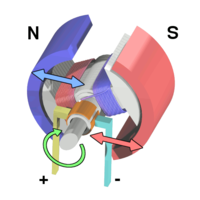 Когда якорь выравнивается по горизонтали, крутящий момент становится равным нуль. В этот момент коммутатор меняет направление тока через катушку, меняя магнитное поле.
Когда якорь выравнивается по горизонтали, крутящий момент становится равным нуль. В этот момент коммутатор меняет направление тока через катушку, меняя магнитное поле.  Затем процесс повторяется.
Затем процесс повторяется.  Электродвигатели различных размеров
Электродвигатели различных размеров Когда ток проходит через катушку, намотанную вокруг мягкого железный сердечник, расположенный во внешнем магнитном поле, на сторону положительного полюса действует направленная вверх сила, а на другую сторону действует направленная вниз сила. Согласно правилу левой руки Флеминга, силы вызывают вращающий эффект на катушке, заставляя ее вращаться. Чтобы двигатель вращался в постоянном направлении, коммутаторы «постоянного тока» меняют направление тока каждые полцикла (в двухполюсном двигателе), заставляя двигатель продолжать вращаться в том же направлении.
Проблема с двигателем, показанным выше, заключается в том, что когда плоскость катушки параллельна магнитному полю, т.е. когда полюса ротора расположены под углом 90 градусов к полюсам статора - крутящий момент равен нулю. На рисунках выше это происходит, когда сердечник катушки расположен горизонтально - положение, которое он вот-вот достигнет на предпоследнем изображении справа. В этом положении двигатель не запустится. Однако, как только он будет запущен, он продолжит вращаться через это положение по инерции.
У этой простой конструкции стойки есть вторая проблема. В положении с нулевым крутящим моментом обе щетки коллектора касаются (перекрывают) обе пластины коллектора, что приводит к короткому замыканию. Провода питания закорочены вместе через пластины коммутатора, а катушка также закорочена через обе щетки (катушка закорочена дважды, по одному на каждую щетку независимо). Обратите внимание, что эта проблема не зависит от проблемы, не связанной с запуском выше; даже если бы в катушке в этом положении был большой ток, крутящий момент все равно был бы нулевым. Проблема здесь в том, что это короткое замыкание бесполезно потребляет энергию, не производя никакого движения (или даже тока в катушке). В демонстрации с питанием от слаботочной батареи это короткое замыкание обычно не считается вредным. Однако, если двухполюсный двигатель был спроектирован для реальной работы с выходной мощностью в несколько сотен ватт, такое короткое замыкание могло привести к серьезному перегреву коммутатора, повреждению щеток и возможному привариванию щеток - если они были металлическими - к коммутатору. Угольные щетки, которые часто используются, не сваривают. В любом случае такое короткое замыкание очень расточительно, быстро разряжает батареи и, как минимум, требует, чтобы компоненты источника питания были спроектированы в соответствии с гораздо более высокими стандартами, чем потребовалось бы просто для работы двигателя без короткого замыкания.
 Внутри миниатюрного двигателя постоянного тока, который можно найти в игрушке.
Внутри миниатюрного двигателя постоянного тока, который можно найти в игрушке. Одно простое решение - сделать зазор между пластинами переключателя, который шире, чем концы щеток. Это увеличивает диапазон угловых положений с нулевым крутящим моментом, но устраняет проблему короткого замыкания; если двигатель запущен внешней силой, он продолжит вращение. С помощью этой модификации его также можно эффективно выключить, просто остановив (остановив) его в положении в диапазоне углов нулевого крутящего момента (то есть бесконтактного переключателя). Такая конструкция иногда встречается в самодельных двигателях для хобби, например для научных ярмарок и такие проекты можно найти в некоторых опубликованных книгах по научным проектам. Явным недостатком этого простого решения является то, что теперь двигатель совершает выбег по значительной дуге вращения дважды за оборот, а крутящий момент является импульсным. Это может сработать для электрических вентиляторов или для поддержания вращения маховика, но есть много применений, даже когда запуск и остановка не требуются, для которых это совершенно неадекватно, например, при управлении шпилем ленточного транспортера или в любом другом случае, когда нужно ускориться. часто и быстро - это требование. Другой недостаток состоит в том, что, поскольку катушки имеют собственную индуктивность, ток, протекающий в них, не может внезапно прекратиться. Ток пытается перепрыгнуть через открывающийся зазор между сегментом коммутатора и щеткой, вызывая искрение.
Даже для вентиляторов и маховиков очевидные недостатки, оставшиеся в этой конструкции, особенно в том, что она не запускается автоматически из всех положений, делают ее непрактичной для рабочего использования, особенно с учетом существующих лучших альтернатив. В отличие от демонстрационного двигателя, приведенного выше, двигатели постоянного тока обычно проектируются с более чем двумя полюсами, могут запускаться из любого положения и не имеют положения, в котором ток может течь без выработки электродвижущей силы, проходя через некоторую катушку. Многие обычные небольшие щеточные электродвигатели постоянного тока, используемые в игрушках и небольших бытовых приборах, самые простые серийные электродвигатели постоянного тока, которые можно найти, имеют трехполюсный якорь. Щетки теперь могут соединять два соседних сегмента коммутатора, не вызывая короткого замыкания. Эти трехполюсные якоря также имеют то преимущество, что ток от щеток протекает либо через две последовательно соединенные катушки, либо только через одну катушку. Начиная с тока в отдельной катушке, равного половине его номинального значения (в результате протекания через две последовательно соединенные катушки), он повышается до своего номинального значения, а затем падает до половины этого значения. Затем последовательность продолжается с током в обратном направлении. Это приводит к более близкому пошаговому приближению к идеальному синусоидальному току катушки, создавая более равномерный крутящий момент, чем у двухполюсного двигателя, где ток в каждой катушке ближе к прямоугольной волне. Поскольку изменения тока вдвое меньше, чем у сопоставимого двухполюсного двигателя, искрение на щетках, следовательно, меньше.
Если вал двигателя постоянного тока вращается под действием внешней силы, двигатель будет действовать как генератор и создавать электродвижущую силу (ЭДС). Во время нормальной работы вращение двигателя создает напряжение, известное как противо-ЭДС (CEMF) или противо-ЭДС, поскольку оно противодействует приложенному напряжению на двигателе. Обратная ЭДС является причиной того, что электродвигатель в режиме холостого хода не имеет такого же низкого электрического сопротивления, как провод, заключенный в его обмотку. Это та же ЭДС, которая возникает, когда двигатель используется в качестве генератора (например, когда электрическая нагрузка, такая как электрическая лампочка, помещается на клеммы двигателя, и вал двигателя приводится в движение внешним крутящим моментом). Следовательно, полное падение напряжения на двигателе состоит из падения напряжения CEMF и паразитного падения напряжения, возникающего из-за внутреннего сопротивления обмоток якоря. Ток через двигатель определяется следующим уравнением:

Механическая мощность, производимая двигателем, определяется по формуле:

Когда ненагруженный двигатель постоянного тока вращается, он генерирует обратную электродвижущую силу, которая сопротивляется току, приложенному к двигателю. Ток через двигатель падает с увеличением скорости вращения, и у двигателя свободного вращения очень небольшой ток. Только когда к двигателю приложена нагрузка, замедляющая ротор, ток, протекающий через двигатель, увеличивается.
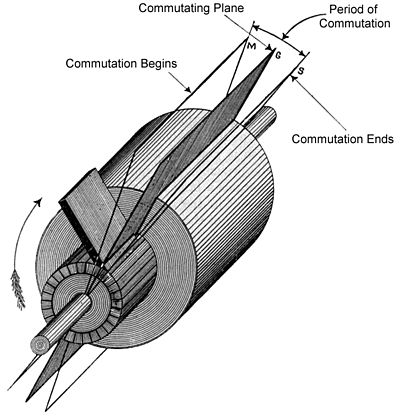
В динамо-машине плоскость, проходящая через центры контактных площадок, где пара щеток касается коммутатора и параллельная оси вращения якоря, называется коммутирующий самолет. На этой схеме коммутирующая плоскость показана только для одной из щеток, предполагая, что другая щетка контактирует с другой стороной коммутатора с радиальной симметрией, под углом 180 градусов от показанной щетки.
 |
В реальном динамо-машине поле никогда не бывает идеально однородным. Вместо этого, когда ротор вращается, он вызывает эффекты поля, которые перетаскивают и искажают магнитные линии внешнего невращающегося статора.
 Преувеличенный пример того, как поле искажается ротором. Преувеличенный пример того, как поле искажается ротором. |  Железные опилки показывают искаженное поле поперек ротора. Железные опилки показывают искаженное поле поперек ротора. |
Чем быстрее вращается ротор, тем больше степень искажения поля. Поскольку динамо-машина наиболее эффективно работает с полем ротора, расположенным под прямым углом к полю статора, необходимо либо замедлить, либо продвинуть положение щетки, чтобы привести поле ротора в правильное положение, чтобы оно находилось под прямым углом к искаженному полю.
 Центрированное положение коммутирующей плоскости, если не было эффектов искажения поля. Центрированное положение коммутирующей плоскости, если не было эффектов искажения поля. |  Фактическое положение коммутирующей плоскости для компенсации искажения поля. Фактическое положение коммутирующей плоскости для компенсации искажения поля. |
Эти эффекты поля меняются, когда направление вращения меняется на противоположное. Поэтому сложно построить эффективную реверсивную коммутируемую динамо-машину, поскольку для максимальной напряженности поля необходимо переместить щетки на противоположную сторону от нормальной нейтральной плоскости.
Эффект можно рассматривать как нечто похожее на опережение синхронизации в двигателе внутреннего сгорания. Как правило, динамо-машина, которая была разработана для работы с определенной фиксированной скоростью, будет иметь свои щетки, постоянно закрепленные для выравнивания поля для максимальной эффективности на этой скорости.
Машины постоянного тока с обмотанными статорами компенсируют искажение с помощью и компенсационные обмотки.
Двигатели постоянного тока с щеточным покрытием имеют ротор с обмоткой и статорами с обмоткой или постоянными магнитами.
Катушки возбуждения традиционно существовали в четырех основных форматах: с раздельным возбуждением (sepex), с серией с обмоткой, с шунтом с обмоткой и комбинацией последних двух; составная рана.
В двигателе с последовательной обмоткой катушки возбуждения электрически соединены последовательно с катушками якоря (через щетки). В двигателе с шунтирующей обмоткой катушки возбуждения подключены параллельно или «шунтируются» к катушкам якоря. В двигателе с раздельным возбуждением (sepex) катушки возбуждения питаются от независимого источника, такого как двигатель-генератор, и на ток возбуждения не влияют изменения тока якоря. Система sepex иногда использовалась в тяговых двигателях постоянного тока для облегчения контроля проскальзывания колес.
Типы с постоянным магнитом имеют некоторые преимущества в производительности по сравнению с постоянным током, возбужденные, синхронные типы, и стали преобладающими в приложениях с дробной мощностью. Они меньше, легче, эффективнее и надежнее, чем другие электрические машины с однополярным питанием.
Первоначально во всех крупных промышленных двигателях постоянного тока использовались магниты с обмоткой или роторные магниты. Постоянные магниты традиционно использовались только в небольших двигателях, потому что было трудно найти материал, способный удерживать поле высокой напряженности. Только недавно достижения в области материаловедения позволили создать высокоинтенсивные постоянные магниты, такие как неодимовые магниты, что позволило разрабатывать компактные высокомощные двигатели без дополнительных объемов катушек возбуждения и средств возбуждения. Но по мере того, как эти высокоэффективные постоянные магниты все чаще применяются в системах электродвигателей или генераторов, возникают другие проблемы (см. синхронный генератор с постоянными магнитами ).
Традиционно поле прикладывалось радиально - внутрь и от оси вращения двигателя. Однако в некоторых конструкциях поле течет вдоль оси двигателя, а ротор пересекает силовые линии при вращении. Это позволяет создавать гораздо более сильные магнитные поля, особенно если используются массивы Хальбаха. Это, в свою очередь, дает мощность двигателю на более низких скоростях. Однако сфокусированная магнитная индукция не может увеличиваться относительно ограниченной остаточной магнитной индукции постоянного магнита, несмотря на высокую коэрцитивную силу, и, как и во всех электрических машинах, плотность магнитного потока насыщения магнитопровода является конструктивным ограничением.
Как правило, скорость вращения двигателя постоянного тока пропорциональна ЭДС в его катушке (= приложенное к нему напряжение минус напряжение, потерянное на его сопротивлении.), а крутящий момент пропорционален току. Регулировка скорости может быть достигнута с помощью переменного отвода батареи, переменного напряжения питания, резисторов или электронного управления. Пример моделирования можно найти здесь и. Направление двигателя постоянного тока с обмоткой возбуждения можно изменить, поменяв местами подключения возбуждения или якоря, но не то и другое вместе. Обычно это делается с помощью специального набора контакторов (контакторы направления). Эффективное напряжение можно изменять, вставляя последовательный резистор или переключающее устройство с электронным управлением, состоящее из тиристоров, транзисторов или, ранее, ртутных дуговых выпрямителей.
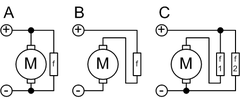
Последовательно-параллельное управление было стандартным методом управления железнодорожными тяговыми двигателями до появления силовой электроники. электровоз или поезд обычно имеют четыре двигателя, которые можно сгруппировать тремя различными способами:
Это обеспечивает три скорости работы с минимальным потери сопротивления. Для трогания с места и разгона дополнительный контроль обеспечивали сопротивления. Эта система была заменена электронными системами управления.
Скорость двигателя постоянного тока можно увеличить путем ослабления поля. Уменьшение напряженности поля осуществляется путем включения сопротивления последовательно с шунтирующим полем или добавления сопротивлений вокруг последовательно соединенной обмотки возбуждения для уменьшения тока в обмотке возбуждения. При ослаблении поля обратная ЭДС уменьшается, поэтому через обмотку якоря протекает больший ток, и это увеличивает скорость. Ослабление поля используется не само по себе, а в сочетании с другими методами, такими как последовательно-параллельное управление.
В схеме, известной как прерыватель, среднее напряжение, приложенное к двигателю, изменяется путем очень быстрого переключения напряжения питания. Поскольку отношение «включено» к «выключено» изменяется для изменения среднего приложенного напряжения, скорость двигателя изменяется. Процент времени включения, умноженный на напряжение питания, дает среднее напряжение, приложенное к двигателю. Следовательно, при питании 100 В и времени включения 25% среднее напряжение на двигателе будет 25 В. Во время выключения индуктивность якоря заставляет ток продолжать проходить через диод, называемый обратным диодом. ", параллельно с двигателем. В этой точке цикла ток питания будет равен нулю, и поэтому средний ток двигателя всегда будет выше, чем ток питания, если процент времени включения не равен 100%. При 100% времени «включения» ток питания и ток двигателя равны. Быстрое переключение потребляет меньше энергии, чем последовательные резисторы. Этот метод также называется широтно-импульсной модуляцией (ШИМ) и часто управляется микропроцессором. Иногда устанавливается выходной фильтр для сглаживания среднего напряжения, подаваемого на двигатель, и уменьшения шума двигателя.
Поскольку двигатель постоянного тока с последовательным заводом развивает максимальный крутящий момент на низкой скорости, он часто используется в тяговых приложениях, таких как электрические локомотивы и трамваи.. Другое применение - стартеры для бензиновых и малых дизельных двигателей. Серийные двигатели никогда не должны использоваться в приложениях, где привод может выйти из строя (например, ременные передачи). По мере ускорения двигателя ток якоря (и, следовательно, возбуждения) уменьшается. Уменьшение поля приводит к ускорению двигателя, а в крайних случаях он может даже разрушить себя, хотя это гораздо менее серьезная проблема для двигателей с вентиляторным охлаждением (с вентиляторами с автоматическим приводом). Это может стать проблемой для железнодорожных двигателей в случае потери сцепления, поскольку, если быстро не взять под контроль двигатели, они могут развивать скорость намного выше, чем при обычных обстоятельствах. Это может вызвать проблемы не только для самих двигателей и шестерен, но и из-за разницы скоростей между рельсами и колесами может также вызвать серьезные повреждения рельсов и ступеней колес, поскольку они быстро нагреваются и охлаждаются. Ослабление поля используется в некоторых электронных элементах управления для увеличения максимальной скорости электромобиля. В простейшей форме используется контактор и резистор для ослабления поля; электронное управление контролирует ток двигателя и включает резистор ослабления поля в цепь, когда ток двигателя уменьшается ниже заданного значения (это будет, когда двигатель будет работать на полной расчетной скорости). Как только резистор включен в цепь, двигатель увеличит скорость выше своей нормальной скорости при номинальном напряжении. Когда ток двигателя увеличивается, система управления отключает резистор и становится доступным момент на низкой скорости.
A Уорд Леонард обычно используется для управления шунтирующим или составным двигателем постоянного тока и разработан как метод обеспечения двигателя с регулируемой скоростью от источника переменного тока, хотя это не лишен своих преимуществ в схемах постоянного тока. Источник переменного тока используется для привода двигателя переменного тока, обычно асинхронного двигателя, который приводит в действие генератор постоянного тока или динамо. Выход постоянного тока от якоря напрямую связан с якорем двигателя постоянного тока (иногда, но не всегда идентичной конструкции). Шунтирующие обмотки возбуждения обеих машин постоянного тока возбуждаются независимо через переменные резисторы. Чрезвычайно хорошее управление скоростью от состояния покоя до полной скорости и постоянный крутящий момент можно получить, изменяя ток возбуждения генератора и / или двигателя. Этот метод управления был де-факто методом с момента его разработки до момента его замены на твердотельные тиристорные системы. Она нашла применение практически в любой среде, где требовалось хорошее управление скоростью, от пассажирских лифтов до обмотки головок больших карьеров и даже промышленного технологического оборудования и электрических кранов. Его основным недостатком было то, что для реализации схемы требовалось три машины (пять в очень больших установках, поскольку машины постоянного тока часто дублировались и управлялись тандемным переменным резистором). Во многих случаях установка мотор-генератор часто оставалась постоянно работающей, чтобы избежать задержек, которые в противном случае были бы вызваны ее запуском по мере необходимости. Хотя электронные (тиристорные) контроллеры заменили большинство малых и средних систем Уорда-Леонарда, некоторые очень большие (тысячи лошадиных сил) остаются в эксплуатации. Токи возбуждения намного ниже, чем токи якоря, что позволяет тиристорному блоку среднего размера управлять двигателем гораздо большего размера, чем он может управлять напрямую. Например, в одной установке тиристорный блок на 300 ампер управляет полем генератора. Выходной ток генератора превышает 15 000 ампер, что было бы слишком дорого (и неэффективно) для прямого управления с помощью тиристоров.
A двигателя постоянного тока скорости и крутящего момента зависят от трех различных источников намагничивания, отдельно возбужденное поле, самовозбуждающееся поле или постоянное поле, которые используются выборочно для управления двигателем в диапазоне механической нагрузки. Самовозбуждающиеся полевые двигатели могут быть последовательными, шунтирующими или составными, соединенными с якорем.
Определение
Противо-ЭДС двигателя постоянного тока пропорциональна произведению общей магнитной индукции машины и скорости якоря:
Входное напряжение двигателя постоянного тока должно преодолевать противоэдс, а также падение напряжения, создаваемое током якоря на сопротивлении двигателя, то есть суммарным сопротивлением на щетки, обмотка якоря и обмотка последовательного возбуждения, если есть:
Крутящий момент двигателя постоянного тока пропорционален произведению тока якоря и общей магнитной индукции машины:

где
Начиная с
имеем

где
с высокоомным обмоткой возбуждения двигателя с параллельным возбуждением, подключенной параллельно якорю, V м, R м и Ø постоянны, так что регулировка скорости от холостого хода до полной нагрузки редко превышает 5%. Управление скоростью осуществляется тремя способами:
Двигатель с последовательной обмоткой реагирует на повышенную нагрузку замедлением; ток увеличивается, а крутящий момент увеличивается пропорционально квадрату тока, поскольку один и тот же ток течет как в якоре, так и в обмотках возбуждения. Если двигатель заглох, ток ограничивается только общим сопротивлением обмоток, и крутящий момент может быть очень высоким, но существует опасность перегрева обмоток. Серийные двигатели с обмоткой широко использовались в качестве тяговых двигателей на рельсовом транспорте любого типа, но постепенно заменяются инверторами с питанием от переменного тока . асинхронные двигатели. Противодействующая ЭДС помогает сопротивлению якоря ограничивать ток через якорь. Когда питание подается на двигатель впервые, якорь не вращается, противо-ЭДС равна нулю, и единственным фактором, ограничивающим ток якоря, является сопротивление якоря. Поскольку предполагаемый ток через якорь очень велик, возникает необходимость в дополнительном сопротивлении последовательно с якорем для ограничения тока до тех пор, пока вращение двигателя не сможет создать противодействующую ЭДС. По мере увеличения вращения двигателя сопротивление постепенно снижается.
Наиболее примечательной характеристикой двигателя постоянного тока с последовательной обмоткой является то, что он почти полностью зависит от крутящего момента, необходимого для привода нагрузки. Это подходит для больших инерционных нагрузок, поскольку двигатель разгоняется от максимального крутящего момента, крутящий момент постепенно уменьшается по мере увеличения нагрузки.
Поскольку скорость последовательного двигателя может быть опасно высокой, последовательные двигатели часто имеют редуктор или напрямую подключаются к нагрузке.
Двигатель постоянного тока с постоянными магнитами характеризуется линейной зависимостью между крутящим моментом при остановке, когда крутящий момент максимален при неподвижном валу, и скоростью холостого хода без приложенного крутящего момента на валу и максимальной выходной скоростью. Между этими двумя точками оси скорости существует квадратичная зависимость мощности.
Для увеличения срока службы двигателя постоянного тока используются защитные устройства и контроллеры двигателя для защиты это от механических повреждений, чрезмерной влажности, высокого диэлектрического напряжения и высокой температуры или тепловой перегрузки. Эти защитные устройства определяют состояние неисправности двигателя и либо подают сигнал тревоги, чтобы уведомить оператора, либо автоматически отключают двигатель при возникновении неисправного состояния. В условиях перегрузки двигатели защищены реле тепловой перегрузки . Биметаллические устройства защиты от тепловой перегрузки встроены в обмотки двигателя и изготовлены из двух разнородных металлов. Они сконструированы таким образом, что биметаллические полосы будут изгибаться в противоположных направлениях при достижении заданного значения температуры, размыкая цепь управления и обесточивая двигатель. Нагреватели представляют собой внешние устройства защиты от тепловой перегрузки, подключенные последовательно с обмотками двигателя и установленные в контакторе двигателя . Нагреватели ванны с припоем плавятся в состоянии перегрузки, в результате чего цепь управления двигателем обесточивает двигатель. Биметаллические обогреватели работают так же, как встроенные биметаллическиепротекторы. Предохранители и автоматические выключатели предназначены для защиты от перегрузки по току или короткого замыкания. Реле замыкания на землю также обеспечивает защиту от перегрузки по току. Они контролируют электрический ток между обмотками двигателя и заземлением. В мотор-генераторах реле обратного тока предотвращают разрядку батареи и приводят в действие генератор. Электропривод напряжения может вызвать опасный разгон или снижение скорости, реле напряжения подключаются полюса двигателя для измерения тока возбуждения. Когда ток возбуждения снижается ниже заданного значения, реле отключает питание якоря двигателя. Состояние заблокированного ротора не позволяет двигателю разогнаться после запуска его запускать. Дистанционные реле защищают двигатели от неисправностей, связанных с блокировкой ротора. Защита двигателя от пониженного напряжения обычно встроена в контроллеры двигателя или пускатели. Кроме того, двигатели могут быть защищены от перенапряжений или скачков напряжения с помощью разделительных трансформаторов, устройств стабилизации питания, MOV, разрядников и фильтры гармоник. Условия окружающей среды, такие как пыль, взрывоопасные пары, вода и высокие температуры окружающей среды, могут отрицательно повлиять на работу двигателя постоянного тока. Чтобы защитить двигатель от этих условий окружающей среды, Национальная ассоциация производителей электрооборудования (NEMA) и Международная электротехническая комиссия (IEC) разработали стандартизированные конструкции корпуса двигателя, основанные на защите окружающей среды от загрязнений. На этапе проектирования также можно использовать современное программное обеспечение, такое как Motor-CAD, чтобы повысить тепловую КПД двигателя.
Противо-ЭДС помогает сопротивлению якоря ограничивать ток, протекающий через якорь. При первом подаче питания на двигатель якорь не вращается. В этот момент противоэдс равно нулю, и является единственным фактором, ограничивающим ток якоря, сопротивление и индуктивность якоря. Обычно сопротивление якоря двигателя менее 1 Ом; поэтому ток через якорь при подаче питания будет очень большим. Этот ток может вызвать чрезмерное снижение напряжения, вызвать другое оборудование в цепи, и даже отключить от перегрузки.
Следовательно, возникает необходимость в дополнительном сопротивлении, включенном последовательно с якорем, для ограничения тока до тех пор, пока вращение двигателя не создает противоэдс. По мере увеличения сопротивления двигателя снижается.
 Реостат для ручного пуска двигателя постоянного тока 1917 года с функцией отключения напряжения и перегрузки.
Реостат для ручного пуска двигателя постоянного тока 1917 года с функцией отключения напряжения и перегрузки. Когда была впервые применена технология электрических двигателей и двигателей постоянного тока, большая часть постоянно обслуживалась оператор обучен управлением двигательными системами. Самые первые системы управления двигателями были почти полностью ручными, с сопутствующим запуском и остановкой двигателей, очисткой оборудования, устранением любых механических неисправностей и т. Д.
Первые пускатели двигателей постоянного тока также были полностью ручными, как показано на этом изображении. Обычно оператору требовалось около десяти секунд, чтобы медленно продвигать реостат по контактам, чтобы постепенно увеличивать входную мощность до рабочей скорости. Было два разных класса этих реостатов: один использовался только для запуска, другой - для запуска и регулирования скорости. Пусковой реостат был менее дорогим, но имел меньшие элементы сопротивления, которые сгорали бы, если бы двигатель работал на постоянной скорости.
Этот пускатель включает в себя функцию магнитного удержания без напряжения, которая заставляет реостат пружинить в положение «выключено» при потере питания, так что позже двигатель не пытаетсяпуститься в положение полного напряжения. Он также имеет защиту от перегрузки по току , которая переводит рычаг в положении выключения, если обнаруживается чрезмерный ток сверх установленной величины.
Указывается входящая мощность как L1 и L2. Компоненты, обозначенные пунктирными линиями, образуют трехточечный стартер. Как следует из названия, есть только три соединения с пускателем. Подключения к якорю обозначены как A1 и A2. Концы катушки возбуждения (возбуждения) обозначены как F1 и F2. Для управления скоростью полевой реостат включен последовательно с шунтирующим полем. Одна сторона линии соединена с рычагом стартера (на схеме обозначена стрелкой). Рычаг подпружинен, поэтому он вернется в положение «Выкл.», Если не удерживается ни в каком другом положении.
Четырехточечный стартер устраняет недостаток трехточечного стартера. В дополнение к тем же трем точкам, которые использовались с трехточечным стартером, другая сторона линии, L1, является четвертой точкой, подводимой к стартеру, когда рычаг перемещается из положения «Выкл.». Катушка удерживающего магнита подключается к линии. Удерживающий магнит и пусковые резисторы работают так же, как и в трехпозиционном пускателе.