
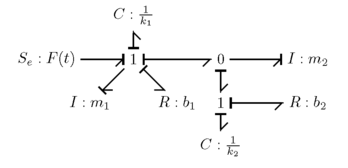
Простая система
масса - пружина - амортизатор и ее эквивалентная форма графа связей
A граф связей - это графическое представление физическая динамическая система. Это позволяет преобразовать систему в представление в пространстве состояний. Он аналогичен блок-схеме или графу потока сигналов, с той разницей, что дуги в графах обеспечивает обмен двунаправленный обмен физическими энергией, в то время как на блок-схемах и диаграммах потоков сигналов представлены однонаправленные потоки информации. Графики связи являются мультиэнергетическими (например, механическими, электрическими, гидравлическими и т. Д.) И нейтральными. Это означает, что граф связей может легко привлечь несколько доменов.
График связей состоит из «связей», которые связывают вместе элементы «однопортовый», «двухпортовый» и «многопортовый» (подробности см. Ниже). Каждая связь представляет собой мгновенный поток энергии (dE / dt) или мощность. Поток в каждой облигации обозначается парой, называемые степенными переменными произведением, которое представляет собой мгновенную мощность облигации. Переменные мощности разбиты на две части: расход и усилие. Например, для электрической системы поток - это ток, усилие - это напряжение. Умножив ток и напряжение в этом примере, вы можете получить мгновенную мощность связи.
Связка кратко показывает два других признака, которые здесь и более подробно ниже. Один из них - условное обозначение «полустрелки». Это определяет предполагаемое направление положительной энергии. Как и в случае электрических цепей и диаграмм свободного тела, выбор положительного направления произвольным, с оговоркой, что аналитик должен во всем согласовываться с выбранным определением. Другая особенность - «причинность». Это вертикальная полоса, размещенная только на одном конце связи. Это не произвольно. Как описаны ниже, существуют правила для надлежащей причинности данному порту и правила для приоритета между портами. Причинность объясняет математическую связь между усилием и потоком. Положения причинно-следственных связей показывают, какие из переменных мощности являются зависимыми, какими независимыми.
Если динамика моделируемой физической системы работает в широком диапазоне временных масштабов, непрерывное поведение может быть смоделировано как мгновенное явление с помощью графа гибридных связей. Графики связи были изобретены Генри Пейнтером.
Содержание
- 1 Тетраэдр состояния
- 2 Компоненты
- 2.1 Однопортовые элементы
- 2.1.1 Источники и приемники
- 2.1.2 Инерция
- 2.1.3 Сопротивление
- 2.1.4 Соответствие
- 2.2 Двухпортовые элементы
- 2.2.1 Трансформатор
- 2.2.2 Гиратор
- 2.3 Многопортовые элементы
- 2.3.1 0-соединения
- 2.3. 2 1-соединение
- 3 Причинность
- 3.1 Определение причинно-следственной связи
- 4 Преобразование из других систем
- 4.1 Электромагнитное
- 4.2 Линейно-механическое
- 4.3 Упрощение
- 4.4 Параллельное питание
- 4.5 Примеры
- 4.5.1 Простая электрическая система
- 4.5.2 Расширенная электрическая система
- 4.5.3 Простая линейная механика
- 4.5.4 Расширенная линейная механика
- 5 Уравнения состояния
- 6 Международные конференции по моделированию графов облигаций (ECMS и ICBGM)
- 7 См. Также
- 8 Ссылки
- 9 Примечания
- 10 Дополнительная литература
Тетраэдр состояния

Тетраэдр состояния
Тетраэдр состояния - это тетраэдр, который графически показывает преобразование между усилие и поток. На соседнем изображении представлена тетраэдр в обобщенном виде. Тетраэдр можно модифицировать в зависимости от области энергий. В таблице ниже показаны переменные и константы тетраэдра состояния в общих областях энергии.
Используя тетраэдр состояния, можно найти математическую связь между любыми переменными на тетраэдре. Это делается путем следования стрелкам вокруг диаграммы и умножения любых констант по пути. Например, если вы хотите найти связь между обобщенным потоком и обобщенным смещением, вы должны начать с f (t), а затем интегрировать его, чтобы получить q (t). Больше примеров можно увидеть ниже.
Связь между обобщенным смещением и обобщенным потоком.

Взаимосвязь между обобщенным потоком и обобщенными усилиями.

Связь между обобщенным потоком и обобщенным импульсом.

Связь между обобщенным импульсом и обобщенным усилием.

Взаимосвязь между обобщенным потоком и обобщенными усилиями, включая константа C.

Все математические соотношения неизменными при переключении энергетических областей, меняются только символы. Это можно увидеть на следующих примерах.
Взаимосвязь между смещением и скоростью.

Связь между током и напряжением, это также известно как закон Ома.

Взаимосвязь между силой и перемещением, также известный как закон Гука. Отрицательный знак опускается в этом уравнении, потому что знак учитывается в направлении стрелки на графике облигаций.

Компоненты
Если двигатель соединен с колесом через На валу мощность передается во вращательной механической области, что означает, что усилие и поток обеспечивает собой крутящий момент (τ) и угловую скорость (ω) соответственно. Граф связи слов - это первый шаг к графу связи, в котором слова определяют компоненты. В виде графа словесных связей эта система будет выглядеть так:

Полустрелка используется для обозначения знака, поэтому, если двигатель работает, когда τ и ω положительные, тогда будет нарисована диаграмма:

Эту систему также можно представить в более общем виде. Это предполагает переход от использования слов к символам, представляющим одни и те же предметы. Эти символы основаны на обобщенной форме, как объяснено выше. Он будет представлен как источник усилий для системы. Колесо может быть представлено импедансом в системе. Кроме того, символы крутящего момента и угловой скорости опускаются и заменяются обобщенными символами усилия и расхода. Хотя в этом примере это не обязательно, связано обычно нумеруют. Упрощенную схему можно увидеть ниже.

Учитывая, что усилие также всегда поток на облигации, можно полностью отказаться от усилий и расхода без потери какой-либо формы информации. Однако не следует опускать номер облигаций. Пример можно увидеть ниже.

Номер связи будет важен позже при преобразовании из графа связей в уравнения состояний.
Элементы с одним портом
Элементы с одним портом - это элементы в графе связей, которые могут иметь только один порт.
Источники и приемники
Источники - это элементы, которые включают вход для системы. Они будут либо вкладывать усилия, либо перетекать в систему. Они обозначаются заглавной буквой «S» и строчной буквой «е» или «f» для обозначения усилия или расхода соответственно. У источников всегда будет стрелка, указывающая от элемента. Примеры источников включает: двигатели (источник усилий, крутящего момента), источники напряжения (источник усилий) и источники тока (источник потока).

где J обозначает соединение.
Приемники - это элементы, которые предоставляют выход для системы. Они имеют так же представление, как и источники, указывающие на элемент, а не от него.

Инерция
Элементы инерции обозначаются заглавной буквой «I», и в них всегда течет энергия. Инерционные элементы - это элементы, накапливающие энергию. Чаще всего это масса для механических систем и индукторы для электрических систем.

Сопротивление
Элементы сопротивления обозначаются заглавной буквой «R», и в них всегда течет энергия. Элементы сопротивления - это элементы, рассеивающие энергию. Чаще всего это демпфер для механических систем и резисторы для электрических систем.

Соответствие
Элементы соответствуют обозначаются заглавной буквой "C", и в них всегда течет энергия. Элементы которые соответствуют - это элементы, хранят потенциальную энергию. Чаще всего это пружины для механических систем и конденсаторы для электрических систем.

Двухпортовые элементы
Эти элементы имеют два порта. Они используются для мощности изменения между системой или внутри нее. При преобразовании из одного в другой во время передачи не теряется мощность. У элементов есть константа, которая будет дана вместе с ней. Константа называется постоянной трансформатора или постоянной гиратора в зависимости от того, какой элемент используется. Эти константы обычно в виде отношений под пунктами.
Трансформатор
Трансформатор применяет взаимосвязь между расходом на выходе и усилием при выходе. Примеры включают идеальный электрический трансформатор или рычаг.
, обозначенный

где r обозначает модуль трансформатора. Это означает

и

Гиратор
A Гиратор применяет взаимосвязь между потоком в усилии на выходе и усилием на выходе. Примером гиратора является двигатель постоянного тока, который преобразует напряжение (электрическое усилие) в угловую скорость (угловой механический поток).

означает, что

и

Многопортовые элементы
Соединения, в отличие от других элементов, могут иметь любое количество входных и выходных портов. Соединения распределяют мощность между своими портами. Есть два различных соединения, 0-соединение и 1-соединение, которые отличаются только тем, как усилие и поток передаются через них. Один и тот же переход в серии можно комбинировать, но разные соединения в серии - нет.
0-стыки
0-стыки ведут себя так, что все значения усилий на стыках равны, но сумма значений расхода в равной сумме значений расхода на выходе, или, что эквивалентно, сумма всех потоков равна нулю. В электрической цепи 0-переход является узлом и представляет собой напряжение, разделяемое всеми компонентами в этом узле. В механической схеме 0-соединение представляет собой соединение компонентов и представляет собой силу разделяемых всеми компонентами, подключенными к нему.


Пример показан ниже.

Результирующие уравнения:


1-переходы
1-переходы ведут себя противоположно 0-переходам. 1-переходы ведут себя так, что все значения потока по всем связям, но сумма значений усилия сумме значений усилия на выходе, или, что эквивалентно, сумма всех усилий равна нулю. В электрической цепи 1 переход представляет собой последовательное соединение компонентов. В механической схеме 1-переход представляет собой скорость, разделяемую всеми подключенными к нему компонентами.


Пример показан ниже.

Результирующие уравнения:


Причинность
Графы связи имеют понятие причинности, указывающее, какая сторона связи определяет мгновенное усилие, а какая - мгновенный поток. При формулировании динамических зависимостей, описывающих факторов, факторов определяется для каждого элемента модели, какая переменная зависимой, а какая независимая система. Графическое распространение причинно-следственной связи от элемента одного моделирования к другому упрощает анализ крупномасштабных моделей. В модели графа связей позволяет построить ситуацию моделирования, в которой существует алгебраический цикл; это ситуация, когда переменная определяется рекурсивно как функция самой себя.
В качестве примера связи рассмотрим конденсатор, включенный последовательно с батареей. Физически невозможно мгновенно зарядить конденсатор, поэтому все, что подключено конденсатору, обязательно будет иметь такое же напряжение (переменная усилие), как и на конденсаторе. Точно так же индуктор неможет мгновенно усилить поток, поэтому любой компонент, включенный последовательно с индуктор, обязательно будет иметь тот же поток, что и индуктор. Индуктивно-энергетические компоненты, соответствующие их напряжение и ток и напряжение, соответственно, оказывают влияние на их ток и напряжение.
Примечание: причинно-следственная связь - это симметричная связь. Когда одна сторона «вызывает» усилие, другая «вызывает» поток.
В обозначении графа связей причинный штрих может быть добавлен к концу силовой связи, чтобы указать, что противоположный конец указать усилие. Рассмотрим двигатель с постоянным крутящим моментом, приводящий в движение колесо, то есть источник усилий (SE). Это будет следующим образом:
![\ begin {array} [b] {r} \ text {motor} \\ SE \ end {array} \; \ overset {\ textstyle \ tau} {\ underset {\ textstyle \ omega} {- \! \! \! - \! \! \! - \! \! \! \ rightharpoonup \! \! \! |}} \; \ текст {колесо}](https://wikimedia.org/api/rest_v1/media/math/render/svg/de6dfde02c6c4d3de8d5caa7b60c31a845830392)
Симметрично, сторона с причинным штрихом (в данном случае колесо) определяет поток для связки.
Причинная связь приводит к ограничениям совместимости. Ясно, что только один конец связи может определять усилие, и поэтому только один конец связи может иметь причинный удар. Кроме того, два пассивных компонента с зависимым от времени поведением, I и C, могут иметь только один видной связи: компонент I определяет поток; компонент C определяет усилия. Итак, от соединения J предпочтительная причинная ориентация следующая:

Причина, по которой это предпочтительный метод для этих элементов, может быть подробно проанализирована, если вы рассмотрите уравнения, которые они дадут, показаны тетраэдром.

Полученные уравнения включают интеграл от независимой степенной переменной. Это предпочтительнее, чем результат наличия другой причинной связи, которая приводит к производной. Уравнения можно увидеть ниже.

График облигаций может иметь полосу на одном из этих элементов в нежелательном способе. В таком случае говорят, что в этой связи произошел «причинный конфликт». Результаты причинного конфликта видны только при написании условий для графа. Более подробно это объясняется в этом разделе.
У резистора нет зависящего от времени поведения: приложите напряжение и получите мгновенно, или приложите поток и получите напряжение мгновенно, таким образом, резистор может быть на любом конце причинной связи:

Источники потока (SF) определяют поток, источники усилия (SE) определяют усилие. Трансформаторы пассивны, не рассеивают и не накапливают энергию, поэтому причинно-следственная связь проходит через них:

А гиратор преобразует поток в усилие и усилие в потоке, поэтому, если поток создается с одной стороны, усилие создается с другой стороны, и наоборот:

- Соединения
В 0-соединении усилия равны; в 1-узле потоки равны. Таким образом, в случае причинно-следственных связей только одна связь может вызвать усилие в 0-соединении, и только одна связь может вызвать поток в 1-соединении. Таким образом, если известна причинность одной связи стыка, известна также причинность других. Эта одна связь называется «сильной связью»

Определение причинно-следственной связи
Для определения причинно-следственной связи График облигаций выполняет выполнение шагов. Эти шаги:
- Нарисуйте исходные причинные полосы
- Нарисуйте причинно-следственную связь для связей C и I
- Нарисуйте причинные полосы для соединений 0 и 1, трансформаторов и гираторов
- Нарисуйте Причинные стержни связи R
- При возникновении причинного конфликта замените связь C или I на дифференциацию
Последовательность шагов ниже.

Первый шаг - выявить причинно-следственную связь для источников, среди которых есть только один. Это дает график ниже.

Следующим является построением предпочтительной причинно-следственной связи для связей C.

Затем примените причинность для соединений 0 и 1, трансформаторов и гираторов.

Однако есть проблема с 0-образным переходом слева. Нулевое соединение имеет две причинные перемычки на соединении, но нулевое соединение требует одного и только одного на соединении. Это было вызвано наличием  в предпочтительной-следственной связи. Единственный способ исправить это - перевернуть шкалу причинно-следственных связей. Это приводит к причинному конфликту, исправленная версия диаграммы приведена ниже, а
в предпочтительной-следственной связи. Единственный способ исправить это - перевернуть шкалу причинно-следственных связей. Это приводит к причинному конфликту, исправленная версия диаграммы приведена ниже, а  представляет собой причинный конфликт.
представляет собой причинный конфликт.

Конвертация из других систем
Одно из преимуществ использования облигаций Графики заключается в том, что если у вас есть граф связей, исходная область энергии не имеет значения. Ниже приведены некоторые шаги, которые необходимо выполнить при преобразовании энергетической области в граф связей.
Электромагнитный
Шаги для решения электромагнитной проблемы в виде графа связей следующие:
- Поместите нулевое соединение в каждый узел
- Вставьте источники, R, Соединения I, C, TR и GY с 1 переходом
- Земля (обе стороны, если присутствует трансформатор или гиратор)
- Назначить направление потока мощности
- Упростить
Эти шаги более четко показаны в примерах ниже.
Линейная механика
Шаги для решения линейной механической задачи в виде графа связей следующих:
- Поместите 1-переходы для каждой отдельной скорости (обычно с массой)
- Вставьте связи отдельной скорости (обычно с массой) R и C в их собственных 0-переходах между переходами 1, где они
- Вставьте источники и связи I на соединениях 1, где они представляют
- Назначение направления потока мощности
- Упростить
Эти шаги более показаны в примерах ниже.
Упрощение
Этап упрощения независимо от того, была ли система электромагнитной или линейно-механической. Шаги:
- Удалить связь нулевой мощности (из-за земли или нулевой скорости)
- Удалить соединения 0 и 1 с менее чем тремя связями
- Упростить параллельную мощность
- Объедините 0 переходов последовательных
- Объедините 1 переходов последовательных
Эти шаги более четко показаны в примерах ниже.
Параллельное питание
Параллельное питание - это когда питание работает параллельно в графе связи. Пример параллельного питания показан ниже.

Параллельное питание можно упростить, вспомнив взаимосвязь между усилием и расходом для 0 и 1-переходов. Чтобы решить параллельную мощность, вам сначала нужно записать все уравнения для соединений. Для представленного примера уравнения можно увидеть ниже. (Обратите внимание на число, которое представляет переменная усилие / расход).

Управляя этими уравнениями, вы можете расположить их так, чтобы вы могли найти эквивалентный набор 0 и 1-переходов для описания параллельной мощности.
Например, поскольку  и
и  вы можете заменить переменные в уравнении
вы можете заменить переменные в уравнении  , что приводит к
, что приводит к  и поскольку
и поскольку
 , теперь мы знаем, что
, теперь мы знаем, что  . Это соотношение уравнивания двух переменных усилия можно объяснить нулевым переходом. Управляя другими уравнениями, вы можете обнаружить, что
. Это соотношение уравнивания двух переменных усилия можно объяснить нулевым переходом. Управляя другими уравнениями, вы можете обнаружить, что  , который описывает взаимосвязь 1-соединения. После того, как вы определили необходимые вам взаимосвязи, вы можете перерисовать параллельную силовую часть с новыми соединениями. Результат для примера показан ниже.
, который описывает взаимосвязь 1-соединения. После того, как вы определили необходимые вам взаимосвязи, вы можете перерисовать параллельную силовую часть с новыми соединениями. Результат для примера показан ниже.

Примеры
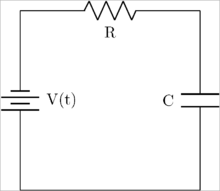
Простая электрическая система
Простая электрическая цепь, состоящая из последовательно соединенных источников напряжения, резистора и конденсатора.
Первый шаг - нарисовать 0-образные соединения на всех узлах. Результат показан ниже.

Следующий шаг - добавить все элементы, действующие сами по себе 1-узловая. Результат ниже.

Следующий шаг - выбрать почву. Земля - это просто нулевой переход, на который принято, что нет напряжения. В этом случае земля будет выбрана как нижний левый 0-образный перекресток, подчеркнутый выше. Следующий шаг - нарисовать все стрелки для графики облигаций. Стрелки на соединениях должны указать на землю (по тому же пути, что и ток). Для элементов сопротивления, инертности и податливости стрелки всегда указывают на элементы. Результат рисования стрелок можно увидеть ниже, где 0-образный перекресток отмечен звездой в земли.

Теперь, когда у нас есть граф Бонда, мы можем начать процесс его упрощения. Первый шаг - удалить все наземные узлы. Оба нижних 0-переходника можно удалить, потому что они оба заземлены. Результат показан ниже.

Затем можно удалить соединения менее чем тремя связями. Это связано с тем, что поток и усилие происходят через эти соединения без изменений, поэтому их можно удалить, чтобы мы могли рисовать меньше. Результат можно увидеть ниже.

Последний шаг - применить причинно-следственную связь к графу облигаций. Применение причинности объяснялось выше. Окончательный график показций представлен ниже.

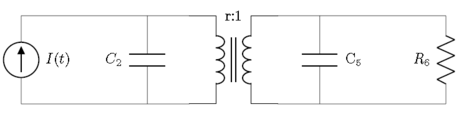
Усовершенствованная электрическая система
Более продвинутая электрическая система с контрольным током, конденсаторами и трансформатором
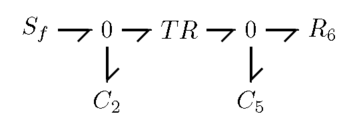
Выполнение шагов с этой приведенной схемой связи, прежде чем он будет упрощен. Узлы, отмеченные звездочкой, обозначают землю.

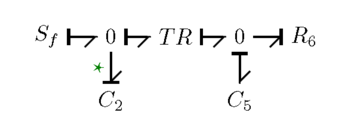
Упрощение графа облигаций к изображению ниже.
Наконец, применение причинно-следственной связи к приведенному ниже графику облигаций. Связь со звездой обозначает причинный конфликт.
Простая линейная механика
Простая линейная механическая система, состоящая из массы на пружине, прикрепленной к стене. К массе приложена некоторая сила. Изображение системы показано ниже.

Для механической системы первый шаг состоит в том, чтобы связать 1 узел на каждой отдельной скорости, в этом случае есть две разные скорости, масса и стенка. Обычно полезно пометить 1-переходы для справки. Результат ниже.

Следующим шагом будет создание связей R и C в их собственных 0-переходах между 1-соединениями, где они находятся. В этом примере есть только одна из этих связей, связь C для пружины. Он действует между 1-соединением, представляет собой массу, представляет собой 1-соединением, представляет собой стену. Результат ниже.

затем вы хотите добавить источники и связи I на 1-переход, где они должны быть. Есть один источник, источник усилий (силы) и одна связь I, масса массы, оба из которых установлены на 1-стык массы. Результат показан ниже.

Затем вы хотите назначить поток мощности. Как и в электрических примерах, мощность по направлению к земле, в данном случае к 1-му стыку стены. Исключениями являются облигации R, C или I, которые всегда указывают на элемент. Полученный график публикаций представлен ниже.

Теперь, когда граф облигаций создан, его можно упростить. Стена заземлена (имеет нулевую скорость), вы можете удалить это соединение. Таким образом, 0-соединение, на котором находится связь C, также может быть удалено, потому что тогда в нем будет меньше трех связей. Упрощенный график облигаций можно увидеть ниже.

Последний шаг - применить причинно-следственную связь, окончательный график связи можно увидеть ниже.

Усовершенствованная линейная механика
Более совершенная линейная механическая система представлена ниже.

Как и в приведенной выше примере, шагом является создание 1-переходов на каждой удаленной скорости. В этом примере есть три удаленных скорости: Масса 1, Масса 2 и стена. Затем вы подключаете все связи и назначаете поток энергии. Облигацию можно увидеть ниже.

Затем вы начинаете процесс упрощения графа связей, удаляя 1-стык стены и удаляя стыки с менее чем тремя связями. График облигаций можно увидеть ниже.

На графике облигаций присутствует параллельная мощность. Решение проблемы параллельной мощности было объяснено выше. Результат ее решения можно увидеть ниже.

Наконец, примените причинно-следственную связь, окончательный график связи можно увидеть ниже.
Уравнения состояния
После завершения графа связей его можно использовать для генерации уравнения представления в пространстве состояний системы. Представление в пространстве является особенно мощным, поскольку оно позволяет решать сложную многопорядковую дифференциальную систему как систему первого порядка. Общий вид уравнения состояния можно увидеть ниже.

где,  - это матрица-столбец число состояний или неизвестных систем.
- это матрица-столбец число состояний или неизвестных систем.  - производная по времени число состояний.
- производная по времени число состояний.  - матрица столбцов входных данных системы. И
- матрица столбцов входных данных системы. И  и
и  - матрицы констант на основе системы. Переменные состояния системы:
- матрицы констант на основе системы. Переменные состояния системы:  и
и  . значения для каждой связи C и I без причинного конфликта. Каждую облигацию я получает , каждая облигация C получает .
. значения для каждой связи C и I без причинного конфликта. Каждую облигацию я получает , каждая облигация C получает .
Например, если у вас есть график облигаций, показанный ниже.

Будет иметь следующий , и матрицы.
![{\ displaystyle {\ dot {\ textbf {x}}} ( t) = \ left [{\ begin {matrix} {\ dot {p}} _ {3} (t) \\ {\ dot {q}} _ {6} (t) \ end {matrix}} \ right ] \ qquad {\ text {и}} \ qquad {\ textbf {x}} (t) = \ left [{\ begin {matrix} p_ {3} (t) \\ q_ {6} (t) \ end {матрица}} \ right] \ qquad {\ text {and}} \ qquad {\ textbf {u}} (t) = \ left [{\ begin {matrix} e_ {1} (t) \ end {matrix} } \ right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2d34aa1cd7d3a785219e84ff8198580a54fea761)
Матрицы и решаются определенные состояния взаимосвязи состояний и соответствующих элементов, как было описано в тетраэдре. Первый шаг к решению уравнения состояния - составить список всех определяющих уравнений для графа связей. В таблице ниже через связь между и их определяющими уравнениями.
Для приведенного пример,
Основные уравнения следующие.

Этими уравнениями можно манипулировать, чтобы получить уравнения состояния. В этом примере вы пытаетесь найти уравнения, которые связывают  и
и  в терминах
в терминах  ,
,  и
и  .
.
Для начала вы должны вспомнить из тетраэдра состояния, что  исходя из уравнения 2, вы можете изменить его так, чтобы
исходя из уравнения 2, вы можете изменить его так, чтобы  .
.  можно заменить на уравнение 4, а в уравнении 4
можно заменить на уравнение 4, а в уравнении 4  можно заменить на
можно заменить на  из-за уравнения 3, которое затем можно заменить уравнением 5.
из-за уравнения 3, которое затем можно заменить уравнением 5.  аналогичным образом можно заменить с помощью уравнения 7, в котором
аналогичным образом можно заменить с помощью уравнения 7, в котором  можно заменить на
можно заменить на  , которое можно заменить уравнением 10. После этой замены получается первое уравнение состояния, которое показано ниже.
, которое можно заменить уравнением 10. После этой замены получается первое уравнение состояния, которое показано ниже.

Второе уравнение состояния может быть также решено, если вспомнить, что  . Второе уравнение состояния показано ниже.
. Второе уравнение состояния показано ниже.

Оба уравнения могут быть преобразованы в матричную форму. Результат ниже.

На этом этапе уравнения можно рассматривать как другую проблему представления в рассмотрении состояний.
Международные конференции по моделированию графов облигаций (ECMS и ICBGM)
Библиографию по моделированию графов облигаций можно использовать из следующих:
- 27-я Европейская конференция ECMS-2013 по моделированию и симуляции, 27–30 мая 2013 г., Олесунн, Норвегия
- ECMS-2008 22-я Европейская конференция по моделированию и моделированию, 3–6 июня 2008 г. Никосия, Кипр
- ICBGM-2007: 8-я Международная конференция по моделированию и симуляции графов облигаций, 15–17 января 2007 г., Сан-Диего, Калифорния, США
- 20-я Европейская конференция ECMS-2006 по моделированию и моделированию, 28–31 мая 2006 г., Бонн, Германия
- IMAACA-2005 Международная конференция по средиземноморскому моделированию
- Международная конференция ICBGM-2005 по моделированию и моделированию графов облигаций, 23–27 января 2005 г., Новый Орлеан, Луизиана, США - Статьи
- Международная конференция ICBGM-2003 по моделированию и симуляции графов облигаций (ICBGM '2003) 19–23 января 2003 г., Орландо, Флорида, США - Документы
- 14-я Европейская сим-карта симпозиум по математике 23–26 октября 2002 г. Дрезден, Германия
- ESS'2001 13-й Европейский симпозиум по моделированию, Марсель, Франция 18–20 октября 2001 г.
- Международная конференция ICBGM-2001 по моделированию и моделированию графов облигаций (ICBGM 2001), Феникс, Аризона, США
- Многоконференция по европейскому моделированию 23–26 мая 2000 г., Гент, Бельгия
- 11-й Европейский симпозиум по моделированию, 26–28 октября 1999 г. Замок, Университет Фридриха-Александра, Эрланген-Нюрнберг, Германия
- Международная конференция ICBGM-1999 по моделированию и симуляции графов облигаций 17–20 января 1999 г. Сан-Франциско, Калифорния
- 9-й Европейский симпозиум и выставка ESS-97 по моделированию в промышленности, Пассау, Германия, 19–22 октября 1997 г.
- ICBGM-1997 3-я Международная конференция по моделированию и моделированию графов облигаций, 12–15 января 1997 г., Sheraton-Crescent Hotel, Феникс, Аризона
- 11-я Европейская мультиконференция по моделированию Стамбул, Турция, 1– 4 июня 1997 г.
- ESM -1996 10-я ежегодная европейская симуляционная мультиконференция, Будапешт, Ху нгари, 2–6 июня 1996 г.
- ICBGM-1995 Int. Конф. по моделированию и симуляции графов облигаций (ICBGM'95), 15–18 января 1995 г., Лас-Вегас, Невада.
См.
- 20-sim программное обеспечение для моделирования на основе теории графов облигаций
- AMESim программное обеспечение для моделирования, основанное на теории графов связей
- Simscape Официальная дополнительная библиотека MATLAB / Simulink для графического программирования Bond Graph
- BG V.2.1 Бесплатная библиотека MATLAB / Simulink для графического программирования графа облигаций
- график гибридных облигаций
Ссылки
Примечания
Дополнительная литература
- Кипурос, Хавьер (2013). Системная динамика и управление с помощью моделирования графа облигаций. Бока-Ратон: Тейлор и Фрэнсис. doi : 10.1201 / b14676. ISBN 978-1-4665-6075-8.
- Пейнтер, Генри М. (1960). Анализ и проектирование инженерных систем. M.I.T. Нажмите. ISBN 0-262-16004-8.
- Карнопп, Дин К.; Марголис, Дональд Л.; Розенберг, Рональд С. (1990). Системная динамика: единый подход. Нью-Йорк: Джон Вили и сыновья. ISBN 0-471-62171-4.
- Тома, Жан Ульрих (1975). Графики облигаций: введение и применение. Оксфорд: Pergamon Press. ISBN 0-08-018882-6.
- Gawthrop, Peter J.; Смит, Лоркан П. С. (1996). Метамоделирование: графы облигаций и динамические системы. Лондон: Прентис-Холл. ISBN 0-13-489824-9.
- Браун, Форбс Т. (2007). Динамика инженерных систем - единый подход, ориентированный на граф. Бока-Ратон: Тейлор и Фрэнсис. ISBN 0-8493-9648-4.
- Мукерджи, Амаленду; Кармакар, Ранджит (2000). Моделирование инженерных систем с помощью графов. Бока-Ратон: CRC Press. ISBN 978-0-8493-0982-3.
- Gawthrop, P.J.; Балланс, Д.Дж. (1999). «Глава 2: Символьные вычисления для управления иерархическими графами облигаций». В Манро, Н. (ред.). Символические методы в анализе и проектирования систем управления. Лондон: Институт инженеров-электриков. Стр. 23 -52. ISBN 0-85296-943-0.
- Боруцкий, Вольфганг (2010). Методология графа облигаций. Лондон: Спрингер. DOI : 10.1007 / 978-1-84882-882-7. ISBN 978-1-84882-881-0.
- http://www.site.uottawa.ca/~rhabash/ESSModelFluid.pdf Объясняет моделирование графа облигаций в Жидкий домен
- http://www.dartmouth.edu/~sullivan/22files/Fluid_sys_anal_w_chart.pdf Объясняет моделирование графа связи в жидком домене

 Простая система масса - пружина - амортизатор и ее эквивалентная форма графа связей
Простая система масса - пружина - амортизатор и ее эквивалентная форма графа связей  Тетраэдр состояния
Тетраэдр состояния 





































































































