
Войти
Большинство систем сонара являются моностатическими, так как передатчик и приемник находятся в одном месте. Бистатический сонар описывает, когда передатчик и приемник (-ы) разделены расстоянием, достаточно большим, чтобы быть сопоставимым с расстоянием до цели.
Это потеря уровня звука, которая происходит, когда звуковой импульс проходит от проектора к цели и от цели к приемнику. Существует 3 различных механизма, вызывающих потерю передачи : сферическое (или цилиндрическое на мелководье) распространение, поглощение и рассеяние на неоднородностях океанской среды. Потери при передаче (TL) пропорциональны дальности (чем дальше распространяется звук, тем больше потери) и частоте звука. В моностатическом эхолоте звук сначала распространяется от проектора к цели, а затем таким же образом обратно от цели к приемнику, поэтому двусторонние потери составляют всего 2TL, где TL - односторонние потери. В бистатическом сонаре общие потери (в децибелах) складываются из TL pt (от проектора до цели) и TL tr (от цели до приемника).
 Мертвая зона бистатического сонара
Мертвая зона бистатического сонара В моностатическом сонаре первое, что слышит приемник, - это звук передаваемого сигнала. Этот уровень звука очень высок, и невозможно обнаружить эхо в течение периода времени τ. Это означает, что цели не обнаруживаются в пределах круга радиуса Cτ / 2, где C - скорость звука в воде. Эту зону обычно называют «мертвой зоной». Если гидролокатор находится близко к поверхности, дну или к обоим (что может произойти на мелководье), мертвая зона может быть больше Cτ / 2 из-за высокого уровня реверберации.
В бистатическом сонаре расстояние перемещения от проектора до цели и от цели до приемника составляет R = R pt + R tr. Поскольку проектор отделен от приемника расстоянием R pr, сначала R pr / C секунд после начала проверки связи, приемник просто ждет. По истечении этого времени он получает прямой сигнал от проектора (часто называемый «прямой взрыв»), который длится τ секунд. Таким образом, гидролокатор не может обнаруживать цели внутри эллипса R = Rpr + Cτ, как показано на рисунке. Высокий уровень реверберации в области проектора не влияет на мертвую зону.
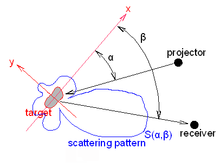 Схема рассеяния от цели
Схема рассеяния от цели Цели не отражают звук во всех направлениях. Механизм отражения звука (или рассеяния на цели) сложен, потому что цель - не просто жесткий шар. Уровень рассеянного звука зависит от угла β, под которым цель освещается проектором, а также изменяется в зависимости от направления рассеяния угла α (см. Локальные оси цели Z {x, y}). Эти углы часто называют аспектами. Эта функция уровня рассеянного звука в зависимости от (α, β) называется диаграммой рассеяния S (α, β). Направление максимального эха (максимум S (α, β)) также зависит от формы и внутренней структуры цели. Так что иногда лучший обволакивающий аспект - это не то же самое, что и аспект наилучшего приема.
Это приводит к бистатическому решению. Рассеяние цели становится еще более сложным, если цель закопана (или частично закопана) в донные отложения моря. (Это случается с морскими минами, контейнерами для отходов, затонувшими кораблями и т. Д.) В этом случае на механизм рассеяния влияют не только характеристики цели, но также взаимодействие звуковой волны между целью и окружающим дном.
 Моностатический прием сонара Моностатический прием сонара |  Бистатическое обратное рассеяние Бистатическое обратное рассеяние |  Бистатическое рассеяние вперед Бистатическое рассеяние вперед |
В моностатическом сонаре приемник слушает эхо, которое отражается (рассеивается) обратно от цели. Бистатический сонар может работать двумя способами: используя либо обратное рассеяние цели, либо прямое рассеяние. Бистатический гидролокатор обратного рассеяния - это сонар, в котором бистатический угол φ меньше 90 °. Рассеяние вперед - это физическое явление, основанное на принципе Бабине. Бистатический гидролокатор с прямым рассеянием - это гидролокатор, у которого бистатический угол φ больше 90 °.
Это гидролокатор с небольшим бистатическим углом. Другими словами, расстояние от проектора до цели R pt и от цели до приемника R tr намного больше, чем расстояние от проектора до приемника R pr.
Это многоузловая система с более чем одним проектором, приемником или обоими.
 Наблюдение на большом расстоянии Наблюдение на большом расстоянии |  Сеть приемников с одним проектором Сеть приемников с одним проектором |  Низкочастотный буксируемый гидролокатор Низкочастотный буксируемый гидролокатор |  Обнаружение скрытых объектов Обнаружение скрытых объектов |
Для При наблюдении за берегом большой приемный массив гидрофонов обычно размещается близко к берегу и соединяется кабелями с наземным центром обработки данных. Для обнаружения цели на большом расстоянии (вдали от берега) можно использовать мощный мобильный проектор, развертываемый с корабля. В системе такого типа используется идея «приблизить проектор к области интереса и уменьшить потери передачи».
Система этого типа является мультистатической. Он использует идею «покрыть интересующую область редкой сетью приемников и озвучить всю область мощным проектором». Приемными узлами могут быть гидроакустические буи (с линией радиосвязи с центром обработки данных) или автономные подводные аппараты (АПА) с акустической линией связи. Примером является проект GOATS, использующий АПА в качестве принимающих узлов.
Чем ниже частота, тем меньше компоненты поглощения и рассеяния потерь при передаче. С другой стороны, чем ниже частота, тем больше размер направленного проектора и приемной решетки. Таким образом, развертываемый на корабле гидролокатор дальнего действия представляет собой низкочастотный гидролокатор с бистатической буксируемой антенной решеткой с пространственно разделенными проектором и приемной решеткой. Примером является буксируемый гидролокатор LFATS.
Чтобы обнаружить скрытый объект, передаваемый эхолот должен проникать на дно. Для этого требуется мощный и направленный проектор. Затем направленный приемник следует разместить в точке, где отражение «цель + окружающее дно» является наилучшим. Это бистатическая система. Примером является проект SITAR, разработанный для поиска таких объектов, как контейнеры с токсичными отходами и шахты.
Основные преимущества бистатического и мультистатического гидролокатора:
К основным недостаткам бистатического и мультистатического сонара относятся: